
本报告探讨了将移动和固定水下传感器组合成一个连贯、分布式网络的概念。该项目提出了数据融合系统的基准架构,该架构有助于近乎实时地交换来自不同来源的信息。该架构反过来又为进一步的系统开发提供了基础,并指导今后对相关数据/信息融合概念和技术的研究,以应用于反潜战(ASW)和水雷战。
本研究采用独特的逆向系统工程方法,根据反潜战杀伤链以及探测、分类和跟踪水下物体的成功概率设计了一个架构。然后将成功概率与人类反潜战操作员的相同成功概率进行比较,以确定设计的适当性。研究小组利用 ExtendSim 软件对架构进行建模和仿真,以验证其功能能力和优于人类反潜潜航器操作员的性能。
由此产生的架构有助于将被动声学传感器信息与情报产品成功整合,并在有人和无人平台上及时分发融合数据。该架构还允许未来向主动声源、环境数据源、非传统反舰导弹源(如雷达和 ESM)发展。
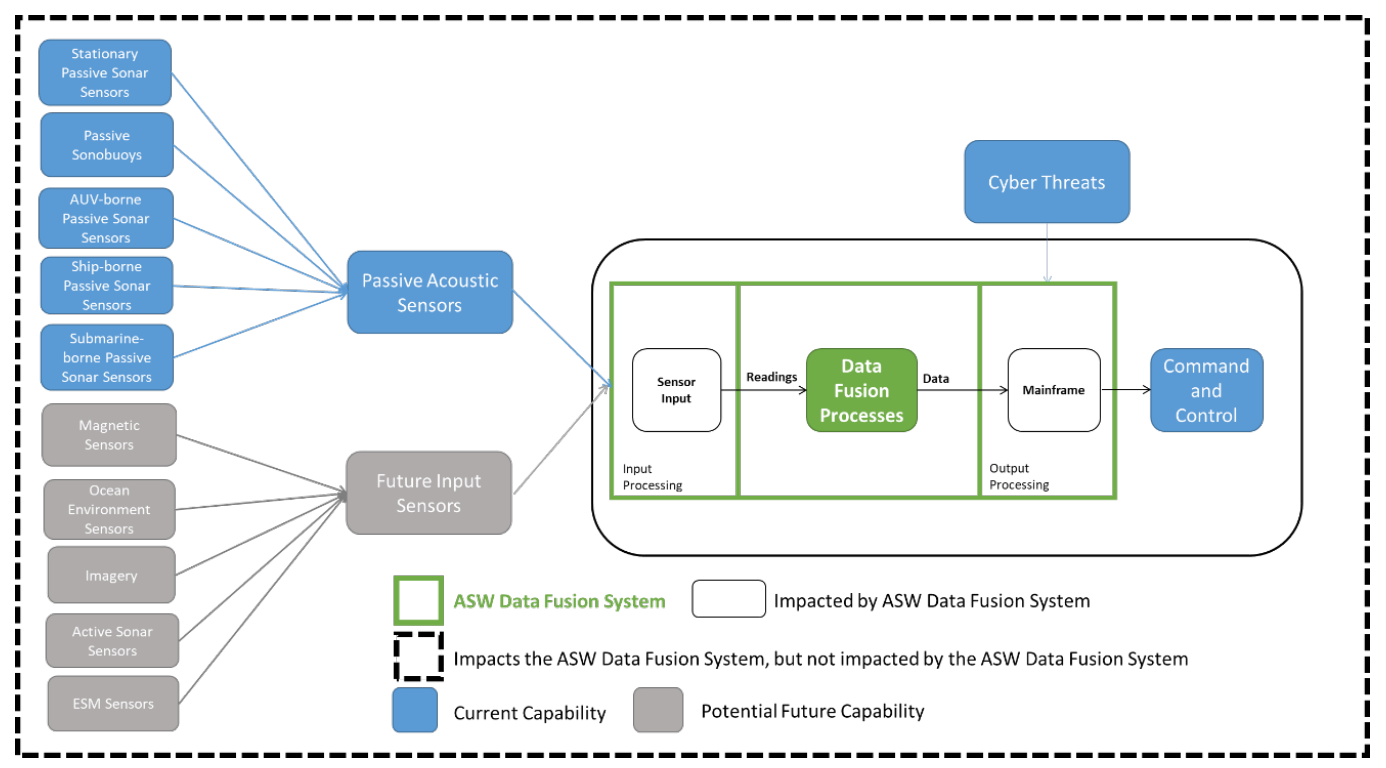
图 1. 反潜战数据融合系统背景图
图 1 描述了项目的范围。反潜战数据融合系统架构封装在绿色框中。黑框描述的是受架构影响的系统,而架构之外的系统则对架构产生影响。团队决定,被动声学传感器将是此次架构迭代中唯一包含的传感器。图中还显示了灰色标记的非被动传感器功能。团队建议在未来的架构迭代中加入这些传感器。图中增加的非被动传感器说明了反潜战数据融合问题的真正范围,并影响了系统设计对未来发展的预期(即,不要建立一个限制性太强的系统,以至于只能使用被动声学传感器)。
研究小组采用标准的杀伤链范式来构思反潜战数据融合系统的成功。杀伤链的串行性质支持卢瑟定律的应用。通常所理解的鲁瑟定律指出,串联系统的可靠性等于其组成子系统可靠性的乘积(迈尔斯,2010 年)。就反潜战数据融合系统而言,该系统就是使用杀伤链表示的反潜战任务,杀伤链的每一步都由反潜战数据融合系统功能表示。将卢瑟定律应用于杀伤链,反潜战任务的成功概率可以用杀伤链中每个环节的成功概率来表征。具体来说,反潜战数据融合系统的成功概率等于探测(发现)、分类(固定)、定位(跟踪)、交战(目标)和杀伤(交战)概率的乘积。图 2 描述了反潜战杀伤链的卢瑟定律。

图 2. 反潜战杀伤链的卢瑟法则
反潜战的现状在很大程度上依赖于人类操作员。实质上,人类操作员充当了数据融合系统的角色。由于目前的处理能力有限,操作员无法评估所有接收到的信息,从而丢失了潜在的相关数据。此外,在杀伤链流程的每一个步骤中,人为错误都可能在不知不觉中注入解决方案。反潜战数据融合架构力求使融合过程自动化,以提高效率,消除人为主观因素和相关错误,从而提高性能,增强反潜战任务的有效性。反潜战数据融合系统的成功取决于该系统的性能至少与人类操作员的性能相当。

