
由于风的干扰和不断变化的轨迹,航母着陆是一项困难的控制任务。对舰载无人机的需求正在不断增加。要满足这一需求,稳健而精确的着陆控制系统至关重要。通过使用观测器来估计未知变量和干扰反馈,可以提高控制性能。本研究采用非线性观测器来估计航母着陆时 F/A-18 飞机俯仰动态中的综合干扰。此外,还设计了调节速度、下降率和垂直位置的控制器。对包括非线性飞行动力学、控制器、航母甲板运动、风和测量噪声在内的完整模型进行了数值模拟,并在软件中实现。结合比例导数控制,所提出的俯仰控制方法非常有效,收敛速度比 PID 控制器快 85%。模拟验证了俯仰控制器能够在噪声和干扰的情况下快速跟踪时变参考。使用的位置控制器效果不佳,需要改进。
目前的大部分研究仍以最初的 AN/SPN-42 航母自动着陆系统结构为基础,如图 2 所示。该系统基于雷达跟踪飞机与航母之间的间隔[4]。在此基础上,根据飞机的航程、高度和所需的滑翔坡度计算出位置误差 [4],经过过滤后通过 PIDDD 制导控制器 [4]。控制器输出俯仰和滚转指令,将飞机操纵到所需的滑行路径[4]。这些指令通过飞机的自动飞行控制系统(AFCS)[4](自动驾驶仪)执行,该系统通过设置执行器信号来跟踪指令。此外,自动功率补偿系统(APCS)通过控制油门来保持参考攻角[4]。在大部分进近过程中,飞机被引导至平均着陆位置。然而,在着陆的最后 12 秒,飞机开始跟踪着陆点的准确位置[4],通过对垂直误差[5]的额外高度指令,利用添加到甲板位置测量中的前导补偿来确定垂直误差,从而预测着陆点的未来位置。大多数现代论文都采用了相同的结构,并侧重于改进单个元素。[6] 比较了基于 PID、PIDDD 和模糊 PID 的 3 种不同制导控制器调整飞行路径的效果。结果表明,在没有湍流的情况下,这些控制器都是有效的。然而,当引入空气动力干扰时,它们都失效了,这突出表明有效的飞行路径控制器至关重要。[4] 研究了 3 种不同的自动驾驶控制器在利用甲板运动预测控制滑行路径方面的有效性。一种是使用升降舵控制俯仰的传统控制器[4],一种是使用扰流板和襟翼改变下沉率的带有直接升力控制器(DLC)的传统控制器[4],一种是带有直接升力控制器和推力矢量的传统控制器。[4]结论是,由于对垂直位移误差的反应速度更快,添加 DLC 后的滑翔斜坡跟踪精度更高[4]。然而,甲板运动预测被假定为完全准确,这意味着在实施之前需要一种准确的甲板运动预测方法。[7] 提出了基于概率的着陆风险模型。这种风险作为补偿状态与基于非线性动态反演的自动驾驶仪一起使用,证明能提高控制系统的快速性和鲁棒性。[8] 提出了一种基于滑模控制的跟踪所需滑行路径的方法。利用蒙特卡洛模拟考虑了各种海况和测量延迟,结果表明所提出的控制器能在 95% 的情况下成功着陆。文献[9]提出了一种基于理想轨迹的最优预览控制方法,通过粒子滤波算法对载波甲板运动预测进行修正,结果表明该方法比 PID 和 LQ 控制器更有效。[10]采用类似方法,发现在典型海况下稳态位置误差小于 0.14 米。[11] 提出了一种基于主动干扰抑制控制的姿态控制器。这里使用了线性扩展状态观测器来估计俯仰动态中的所有内部和外部干扰,并与线性控制器相结合。结果表明,其稳定速度比 PID 控制器快 82%,过冲也更小。本研究提出了一种类似的方法,其中线性控制器为比例-派生控制器,观测器为 2.3 中讨论的非线性观测器。
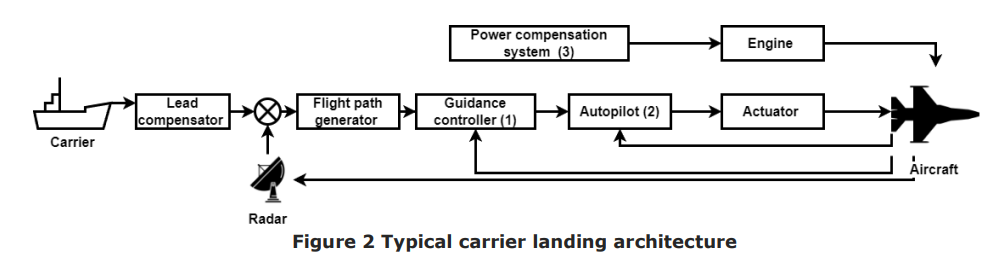
如图 9 所示,所使用的结构将以第 2.1 节中描述的原始结构为基础。飞行路径生成器从着陆位置投射出理想的飞行路径。理想飞行路径与飞机之间的位置误差被确定并输入一个制导控制器,该控制器输出所需的下沉率。下沉率输入下沉控制器,控制器输出所需的俯仰角。俯仰控制器执行该指令,并向升降舵发送控制信号。同时,速度控制器保持恒定的空速。观测器利用来自飞机和俯仰控制器的反馈来估计干扰并改善控制性能。

