
本文介绍了一种独特的方法,即由一个装有网的飞行机器人对不合作的无人驾驶飞行器进行中空自主空中拦截。本文提出了一种名为 “快速响应比例导航(FRPN)”的新型拦截制导方法,旨在依靠机载状态估计和跟踪捕捉灵活机动的目标。在使用 100 个不同复杂度的目标轨迹(包括近 14 小时的飞行数据)进行的仿真中,将所提出的方法与最先进的方法进行了比较,结果表明 FRPN 的响应时间最短,拦截次数最多,而这正是敏捷拦截的关键参数。为了能够从理论和仿真稳健地转移到实际应用中,我们的目标是避免过度拟合目标的特定假设,并解决拦截未知总体轨迹目标的问题。此外,我们还发现了与目标状态的跟踪和估计有关的几个经常被忽视的问题,这些问题会对系统的整体性能产生重大影响。我们建议使用基于交互多模型滤波器和新测量模型的新型状态估计滤波器。模拟实验表明,在考虑一般轨迹时,与常用的卡尔曼滤波法相比,所提出的解决方案能显著提高估计精度。在这些结果的基础上,我们采用所提出的滤波和制导方法实现了一个完整的自主拦截系统,该系统在现实模拟中得到了全面评估,并在与机动目标进行的真实世界实验中得到了测试,其性能远远超出了任何最先进解决方案的性能。
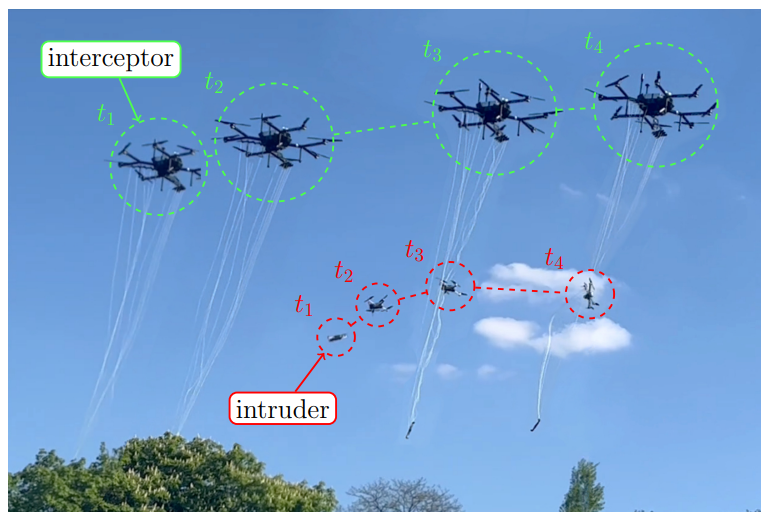
图 1:使用拟议系统成功自主拦截移动目标的拼图。从 t1 到 t4 的机动时间约为 2 秒。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日