

由于全球定位系统在室内容易受到干扰和失去覆盖范围,因此在全球定位系统缺失的环境中进行可靠导航仍然是自主无人系统面临的一项挑战。本研究通过将卷积神经网络(CNN)与视觉传感器集成,研究如何在不依赖 GPS 的情况下实现实时姿态估计,从而解决无人地面车辆(UGV)面临的这一挑战。针对位置和航向估算实施了双 CNN 架构,并在具有相应姿态的大量图像数据集上进行了训练。通过与改进的势场算法集成,实现了周期性漂移估计和校正。其中一个主要贡献是用于漂移校正的世界表示调整方法,该方法可根据 CNN 估计值动态调整航点位置。利用这种方法,在受控环境中实现了连续多圈的成功导航,大大提高了没有漂移校正的基线性能。这项研究的结果表明,通过这种方法可以大大降低自主导航系统对全球定位系统的依赖性,从而有可能提高无人系统对电子战战术的应变能力,使其能够在有争议的环境中持续运行。

美海军部(DON)无人作战框架强调了海军部 “投资于先进自主和无人系统 ”的承诺。随着这些技术的进步和实施,无人系统对可靠定位能力的依赖程度也在增加。然而,在干扰和欺骗等电子攻击成为普遍威胁的有争议环境中,期望全球定位系统(GPS)成为可靠的定位手段变得不那么可行。此外,在室内环境或卫星能见度有限的区域工作时,GPS 的可靠性也会降低。随着无人驾驶系统的使用日益增多,在 GPS 无法使用或不可靠的情况下,有必要提供替代解决方案。
随着无人驾驶系统的分布越来越广,相互连接越来越紧密,GPS 拒绝或欺骗所造成的脆弱性也随之加剧。定位中的单点故障会产生连锁效应,降低整个系统的能力并增加风险。因此,为自主轮式无人飞行器探索可靠、精确的导航技术至关重要,这种技术可在 GPS 信号被屏蔽的环境中有效运行,确保无人驾驶行动在有争议的复杂场景中继续取得成功。
这项研究旨在为在室内环境或 GPS 信号不可靠或不可用的地区运行的无人潜航器开发一种稳健的导航解决方案。该方法将利用两个主要来源的数据:车轮编码器和视觉传感器。车轮编码器数据将使用死算模型进行处理,而 CNN 将用于分析视觉传感器数据。通过将这些技术相结合,该系统将实现无需 GPS 的同步自主导航。这种方法的一个关键方面是实时激活 CNN,CNN 可以解释环境的独特特征,并相应地引导 UGV。
这项研究的范围包括利用深度学习技术为 UGV 开发无 GPS 定位和导航解决方案。将通过 P3-DX Pioneer 机器人系统在室内实验室环境中使用模拟 UGV 进行广泛的验证和测试。不过,某些领域被认为不属于本研究的范围。其中包括路径规划算法的开发,因为车辆将使用现有的反应式自主方法。此外,除视觉数据外,也不会考虑探索其他传感器模式。研究重点将不是在有移动障碍物的高动态环境中进行导航。预计面临的主要技术挑战是优化计算时间以实现实时性能、减少长时间漂移以及在激烈机动过程中保持定位精度。在项目限制条件下,将尽可能利用和调整现有技术和算法,以最大限度地提高鲁棒性。
本论文共分五章,每一章都侧重于研究的一个特定方面。第 2 章:“背景 ”通过介绍和解释与论文工作相关的基本概念,为研究奠定了基础。本章包括对该领域现有文献的全面回顾,重点介绍了当前的技术,并指出了本研究要解决的差距。
第 3 章:“方法与实验设计 ”介绍了论文工作中采用的方法和手段。它详细描述了实验中使用的硬件组件和实施的具体算法。本章还讨论了实验设置、数据收集过程以及用于评估所提解决方案性能的评价指标。
第 4 章:“结果与分析 ”主要评估本研究中开发的 CNN 的性能。本章介绍了获得的实验结果,并对结果进行了深入分析。本章还包括图表等可视化内容,以支持对结果的解释。本章讨论了所提方法的优势和局限性,并将结果与文献中的现有方法进行了比较。
第 5 章:“结论与未来工作 ”总结了论文研究的主要发现和贡献。本章强调了这项工作的意义及其对自主导航和定位领域的潜在影响。此外,本章还确定了未来的研究领域,并为进一步改进和扩展所提出的方法提供了建议。
最后,为简洁起见,“UGV ”和 “机器人 ”这两个术语在本论文中交替使用。
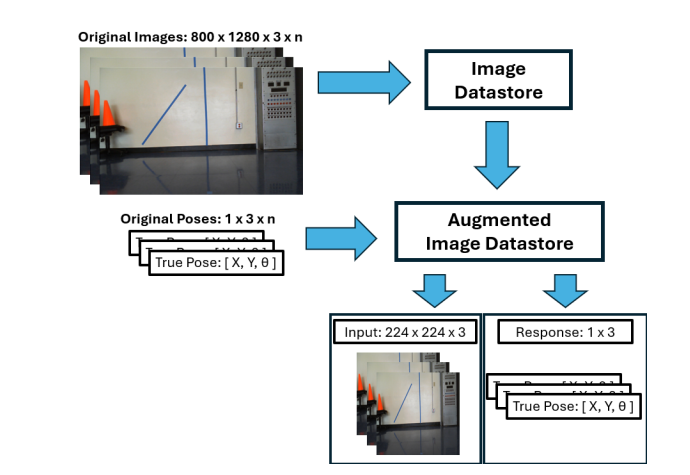
图 3.8. 增强型数据存储过程的可视化表示,这是 CNN 训练的准备阶段。这既减少了图像所需的存储空间,又为 CNN 训练过程保持了适当的预期输出响应。


