
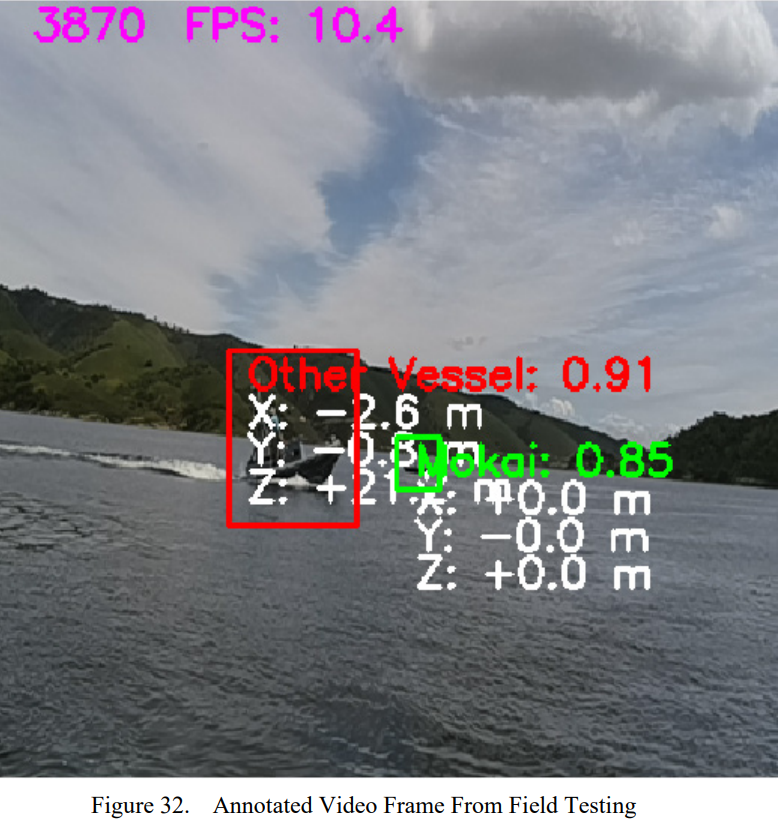
无人水面舰艇(USV)通常依靠全球定位系统(GPS)和射频(RF)通信进行导航和多车协调。在战时环境中,全球定位系统和无线电信号屏蔽对 USV 的有效导航和控制提出了挑战。本论文研究了使用低成本人工智能(AI)立体相机作为传感器,实现 USV 的无 GPS 和 RF 导航与协调。这些相机还可用于对水面船只进行分类和定位。我们使用安装在多艘 Mokai USV 上的 OAK-D AI 摄像机进行了实验。对神经网络 (NN) 模型进行了训练,以识别两个对象类别:Mokai USV 和其他船只。利用开源 Python 库,该模型被直接加载到摄像头上,并集成到机器人操作系统 (ROS) 软件中,以提取检测到的物体的相对姿态信息。为了分析该模型的有效性,我们在未见过的视频上以及使用 Mokai USV 和其他水面舰艇进行的现场实验中对 NN 进行了测试。将摄像机估计的物体定位与在实验室环境中通过物理验证收集的物体地面实况位置进行了比较。最后,还探讨了特定相机硬件和立体视觉在此应用中的局限性,以评估其进一步开发的可行性。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日
Arxiv
152+阅读 · 2023年3月29日


相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日
Arxiv
152+阅读 · 2023年3月29日