该项目为与使用无人系统支持分布式海战(DMO)有关的作战概念和系统设计决策提供信息。研究通过系统地改变仿真模型中的系统设计特征和作战活动,支持对无人系统(UVC)进行能力级分析。分析结果表明,UVC 可提高各种无人系统的作战可用性(Ao)和使用时间(TOS),因为它可随时进入维护、加油和重新武装设施,而无需长时间前往岸基设施或分布式支援舰艇。在比较使用 UVC 的配置与在自适应兵力包 (AFP) 中分配无人系统支持的配置时,单个无人系统的 Ao 提高了 6% 到 31%。仿真模型分析确定了 UVC 架构,其中包括至少 8 个无人机发射回收站、至少 3 个船舷托架和至少 5 个甲板井托架,以最大限度地提高 Ao。
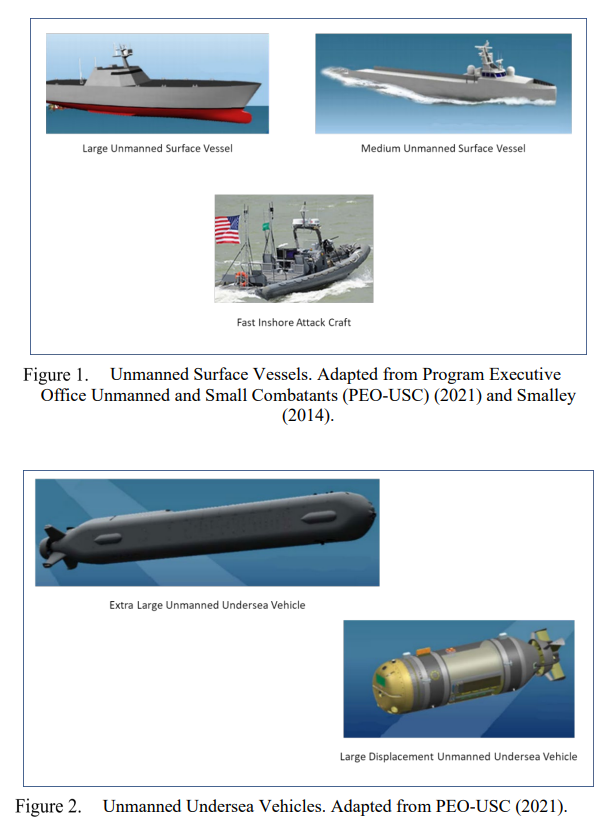
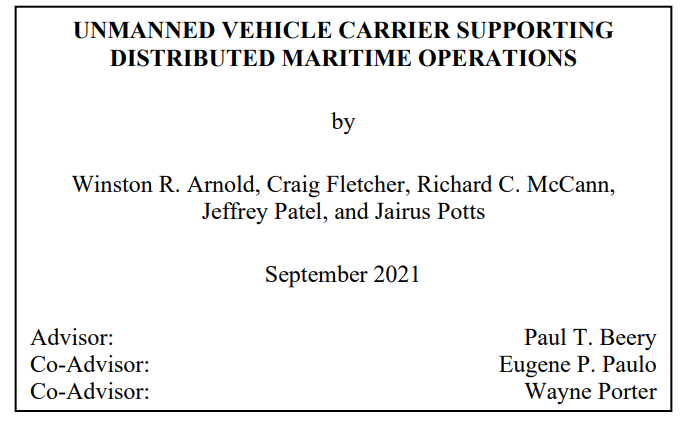
在支持分布式海上作战(DMO)时,无人系统有可能发挥兵力倍增器的作用,在提高杀伤力的同时降低有人系统的风险。然而,无人系统到岸基维护、加油和重新武装设施的转运时间减少了可用于支持执行 DMO 的自适应兵力包(AFP)的总体驻扎时间(TOS)。本项目研究了无人水面舰艇 (USV)、无人水下航行器 (UUV) 和无人机 (UAV) 在美国海军现有舰艇上的集成问题,该舰艇已被重新改装为无人载具 (UVC)。在本报告中,"UxV "一词用于描述无人系统这一类别。
如 Van Bossuyt 等人(2019 年)所述,项目团队采用了系统定义、系统建模和系统分析的通用系统工程流程序列。在系统定义过程中,项目团队重点开发了作战概念(CONOPS),并定义了 UVC 的系统要求。系统建模活动的重点是构建 UVC 的离散事件仿真模型。在系统分析阶段,团队利用所开发的模型来评估 UVC 的各种设计参数对每种无人系统类型的运行可用性(Ao)的影响。
A. 系统定义
在系统定义阶段,从自上而下和自下而上的角度开发和考虑了 UVC 要求。从自上而下的角度来看,团队分析并确定了满足总体任务有效性目标所需的能力,而与任何现有的候选平台无关。从自下而上的角度来看,团队评估了一艘登陆直升机船坞(LHD)舰,以确定该平台可实现的最大 UVC 能力。通过查阅文献和分析利益相关者的需求,项目团队确定了 UVC 的以下关键能力:指挥与控制 (C2)、UxV 发射、UxV 维护和 UxV 回收。根据设想,UVC 将包括着陆甲板无人机发射和回收站、无人机维护/布防/燃料舱、用于大型 USV/UUV 操作的船舷舱或站,以及用于小型 USV/UUV 操作的井甲板舱。
B. 系统建模
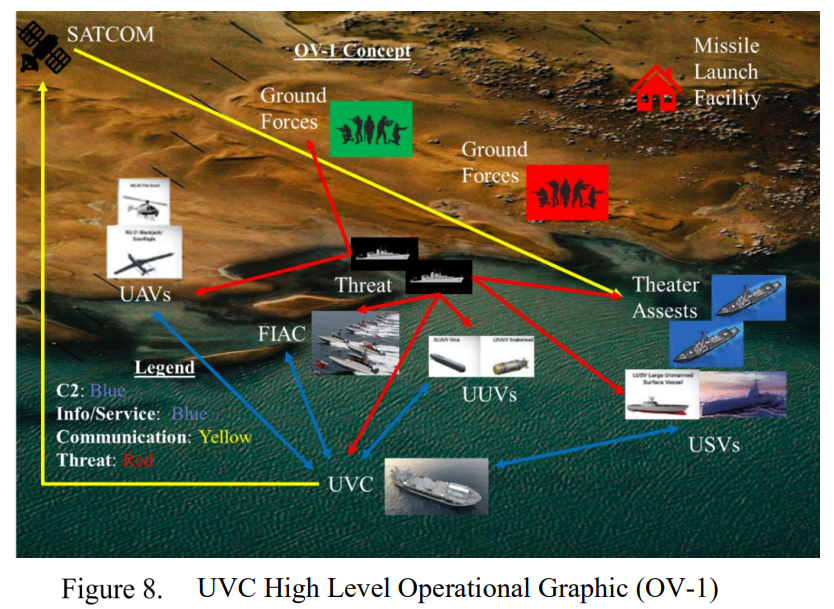
项目构想将 UVC 视为针对地面和岸上敌对兵力实施 DMO 的 AFP 的一部分。UVC 的作用是支持 UxV 对敌方岸基导弹基地进行侦察和打击。在打击阶段之前、期间和之后,UxV 提供全天候的情报、监视和侦察(ISR)、目标定位和战损评估服务。UVC 的总体目标是通过消除到岸基支持设施的较长运输时间来增加 UxV 的全时服务时间。为实现这一总体目标,研究小组选择 "航程 "和 "持续停留时间 "作为性能指标(MOP),并选择 "UxV 任务时间"、"UxV 停机时间 "和 "维护湾利用率 "作为效果指标(MOE)。
设计并开发了一个离散事件仿真模型,用于分析 UVC 设计参数对 MOP 和 MOE 的影响。该模型是通过 ExtendSim10 建模程序开发的。该模型包括 UxV 发射和回收、UxV 维护活动以及 UxV 重新武装和加油活动。UxV 的发射时间表和总模拟运行时间是根据拟议的 UVC CONOPS 制定的。目前,该模型并未考虑 UxV 的损失或故障;这是未来可能开展工作的一个领域。模型的主要输出是每种 UxV 的 Ao。
C. 系统分析
为了广泛探索实验空间,同时减少试验总数和模型运行时间,我们专门设计了一个填充空间的拉丁超立方设计。每次试验重复模拟 30 次并收集结果。合并所得的 Ao 值,得出每个试验的统计平均值。
分析结果表明,UVC 可随时提供维护、加油和重新武装设施,而无需在岸基设施或分布式支援舰艇之间进行长时间的转运,从而改善了每种 UxV 的 Ao 值和 TOS 值。对于任何特定的 UxV,通过增加 UVC 发射、回收和维护站的数量,从而消除或减少这些服务的排队时间,可获得最大的 Ao。分析表明,UVC 在设计时应至少配备 8 个无人机发射/回收站、至少 3 个船舷托架和至少 5 个焊接甲板托架。这些参数没有确定上限,这也是未来研究的一个潜在领域。
有趣的是,虽然 UVC 的存在改善了大型无人水面舰艇(LUSV)的航速,但 UVC 的实际设计似乎对 LUSV 的航速没有影响。这可能是由于 LUSV 的假定任务持续时间长,假定维护间隔长,因此不可能出现任何排队现象。单个船侧停泊区似乎足以为多艘 LUSV 提供服务,但即使是单个船侧停泊区,也可通过消除到岸基设施的转运时间来改善 Ao。