
地球大部分被水覆盖,其中大部分仍未被开发。为了更好地了解我们的环境,海洋学家一直在使用船载传感器和有线飞行器对这些水域进行测绘和监测。有限的探测距离和对载人辅助飞行器的依赖,使得探测任务既昂贵又不频繁。为了解决这个问题,传感器需要独立于支持车辆,它们需要自己冒险进入完全未开发、未绘制地图的海域,并安全地返回并获得数据。这正是自动潜航器(AUV)开始发挥作用的地方。在本论文中,我们将研究如何利用多个小型自动潜航器来高效、准确地感知大量水域。
水下领域带来了大量独特的问题:水会吸收电磁辐射,这意味着基于卫星的全球定位系统(我们将使用 GPS 来指代任何此类系统)、广角相机和无线电通信都是不可行的。这些限制最终导致车辆定位的不确定性。此外,飞行器不断受到水流、鱼类和生物污损的干扰,导致飞行器的动态不确定,甚至在任务期间发生变化。
在本论文的第一部分,我们重点研究了定位不确定情况下的大规模传感问题,研究了笼罩和覆盖问题。在覆盖问题中,每个自动潜航器的确切位置都不确定,同时还肩负着感知静止区域的任务。我们证明了我们仍能保证完全覆盖,并提出了不同方法的效率特征。此外,我们还证明,当飞行器配备传感器和低带宽通信方法时,我们可以通过利用共享姿态图上的环路闭合大大增加 AUV 团队的有效范围。在笼养问题中,定位的不确定性主要集中在被笼养的实体上,其位置未知但有界。我们的研究表明,通过算法组合,可以解决笼住问题,并保证能找到解决方案,同时还能为任务生成规格列表。
在第二部分中,我们重点关注团队中的个体,以及他们需要做些什么才能使 AUV 团队取得成功。首先,我们发现,当一个团队中的飞行器协同工作时,会出现目标冲突的情况。每辆车都需要在满足自身约束条件和团队约束条件之间做出选择。我们结合控制障碍函数(CBF)和行为树(BT),提出了解决这一问题的方法。其次,我们研究了飞行器发生物理变化的可能性,如推进器损坏,导致飞行器无法完成整个任务。即使在这种情况下,如果坏掉的车辆仍能移动,与正常的车辆接触,那么团队的其他成员就可以通过重新规划进行补偿,从而仍能完成整个任务。为此,破损车辆必须对变化进行补偿,直到会合。我们提出了一种数据驱动的管道,可以在一定范围内检测到这种物理变化并围绕其进行规划。
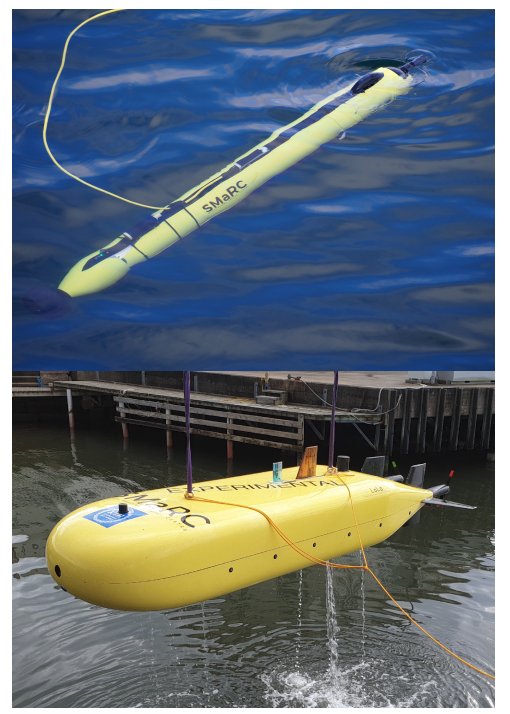
图 1.3:探出水面的小型自主海洋机器人 (SAM)(上图)和吊车上悬挂的正在回收的长航时续航自动潜航器 (LoLo)(下图)。

