本论文提出开发一种弹性机器学习算法,可对海军图像进行分类,以便在广阔的沿海地区开展监视、搜索和探测行动。然而,现实世界的数据集可能会受到标签噪声的影响,标签噪声可能是通过随机的不准确性或蓄意的对抗性攻击引入的,这两种情况都会对机器学习模型的准确性产生负面影响。我们的创新方法采用 洛克菲勒风险最小化(RRM)来对抗标签噪声污染。与依赖广泛清理数据集的现有方法不同,我们的两步流程包括调整神经网络权重和操纵数据点标称概率,以有效隔离潜在的数据损坏。这项技术减少了对细致数据清理的依赖,从而提高了数据处理的效率和时间效益。为了验证所提模型的有效性和可靠性,我们在海军环境数据集上应用了多种参数配置的 RRM,并评估了其与传统方法相比的分类准确性。通过利用所提出的模型,我们旨在增强舰船探测模型的鲁棒性,为改进自动海上监视系统的新型可靠工具铺平道路。
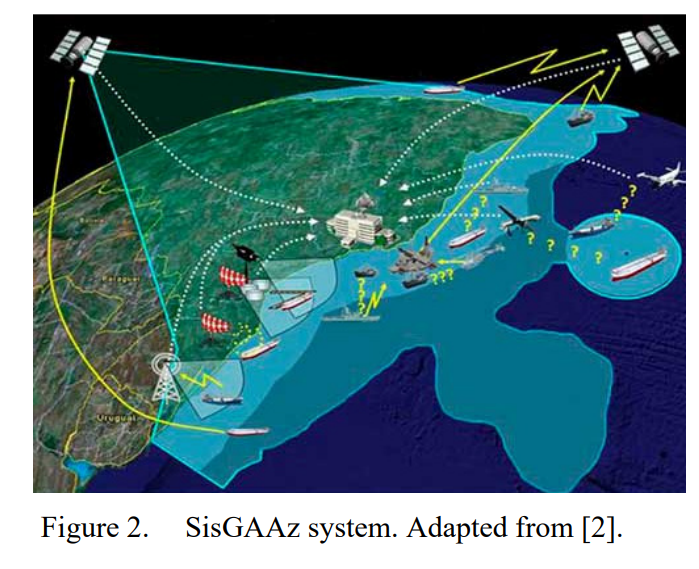
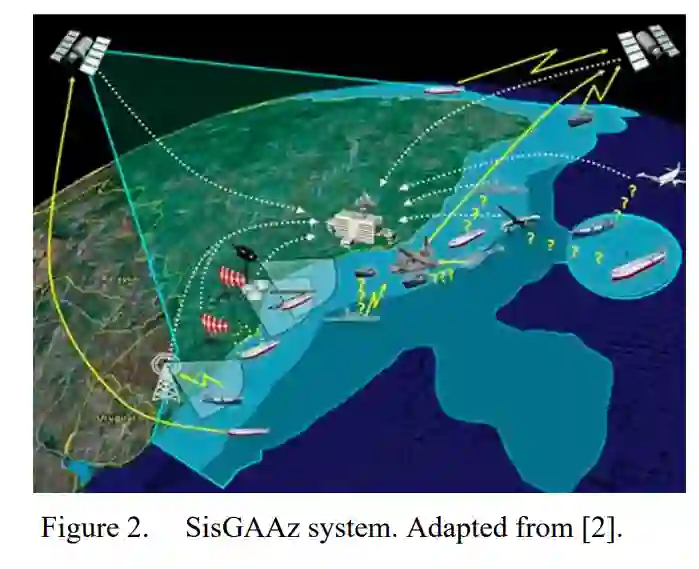
蓝色亚马逊管理系统
机器学习(ML)发展迅速,使机器能够根据数据分析做出决策。计算机视觉(CV)是这一领域的一个专业部门,它使用先进的算法来解释视觉信息,通过创造创新机会来改变汽车、医疗、安全和军事等行业。在军事领域,这些工具已被证明在改进决策、态势感知、监视能力、支持行动以及促进在复杂环境中有效使用自主系统等方面大有裨益。
我们的研究主要集中在将 CV 原理应用于海军领域,特别是解决二元分类问题,以显示船只的存在与否。这构成了更广泛的监视工具的重要组成部分,并采用了一种名为 "Rockafellian 风险最小化"(RRM)[1] 的新策略。RRM 方法旨在应对海上监控等复杂多变环境中固有的数据集标签损坏所带来的挑战。我们方法的核心是交替方向启发式(ADH),这是一种双管齐下的策略,可依次优化不同的变量集。这种两步迭代的过程可调整神经网络权重并操纵数据点概率,从而有效隔离潜在的数据损坏。其结果是建立了一个更强大、更准确的海上监视和探测系统,从而增强了海军行动中的决策和态势感知能力。
我们的评估使用了两个不同的数据集,即空中客车船舶探测(AIRBUS)[2] 和海事卫星图像(MASATI)[3]。为了测试我们方法的鲁棒性,我们逐步提高了这些数据集的标签损坏水平,并观察了这对模型性能的影响。
我们的研究在 ADH 流程中采用了两种策略:w-优化和 u-优化。在 w 优化阶段,我们试用了两种不同的神经网络(NN)优化器 Adam [4] 和 Stochastic Gradient Descent (SGD) [5, Section 3G],以调整神经网络权重。u优化阶段包括实施 ADH-LP(线性规划)或 ADH-SUB(子梯度)算法,以修改每个数据点的概率,并有效隔离潜在的数据损坏。
ADH-LP 利用线性规划进行计算优化,可提供全局最优解,但需要更多处理时间。另一方面,ADH-SUB 采用更快的子梯度方法,更适合较大的数据集或有限的计算资源。主要目的不是通过架构调整来提高性能,而是展示 RRM 方法如何提供优于传统 ERM 方法的优势,特别是在处理数据损坏和提高模型性能方面。
无论使用何种数据集(MASATI 或 AIRBUS),我们的研究采用 RRM 方法训练 NN 始终优于或匹配 ERM 方法。RRM下的ADHLP和ADH-SUB算法在保持高性能水平的同时,对数据损坏表现出了显著的适应能力,其中ADH-LP一直表现优异。总之,我们的研究结果表明,RRM 是一种稳健而有弹性的方法,可用于处理一定程度的数据损坏。
总之,我们利用 RRM 的创新方法为减少对标签正确数据的依赖提供了一种有前途的解决方案,从而能够开发出更强大的船舶检测模型。这项研究在改进船舶自动检测和整体海事安全方面迈出了一大步。通过有效处理数据损坏和测试创新方法,我们提高了海事监控系统有效监控沿海和划界海域的能力。