
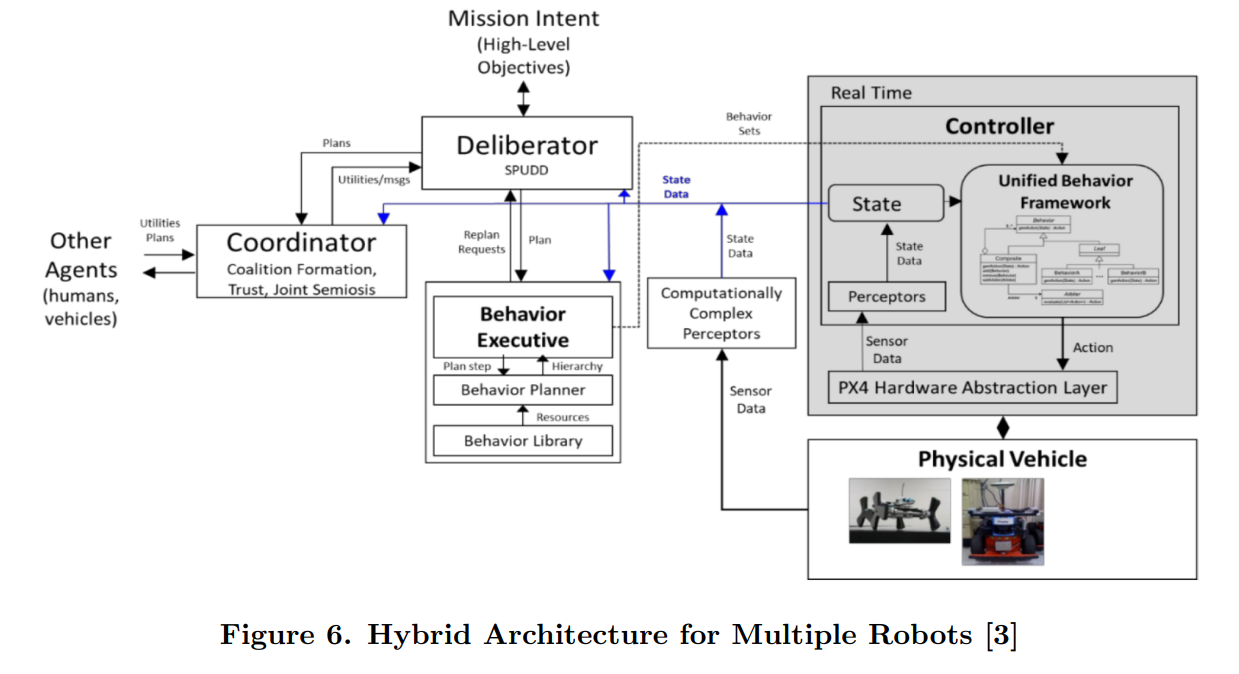
技术进步所带来的进攻技术为对手提供了威胁联合部队和盟军作战优势的机会。要与这些新方法作斗争,就必须不断快速发展自己的 "改变游戏规则 "的技术。通过重点发展无人系统和自主性,空军可以努力保持其技术优势。此外,创建一个强大的框架,能够测试和评估定义自主性的原则,从而探索未来的能力。本研究介绍了反应/慎思混合架构的发展情况,该架构将允许对任务、认知和同伴灵活性原则进行测试。具体来说,这项研究探索了多机器人系统中的同伴灵活性,以多机器人混合架构(HAMR)作为框架基础,解决定位问题。为完成这一任务,结合车辆感知和导航工具对运行环境进行推断。然后,这些推论被用于构建因子图,而定位的核心算法就是在因子图的基础上实施 iSAM2,这是一种高性能的增量矩阵因式分解方法。统一行为框架(UBF)是该框架中单个车辆控制的一个关键组件,它是一种基于行为的控制架构,使用模块化仲裁技术生成动作,从而实现执行器控制。此外,还通过使用容器对世界模型进行分隔,以尽量减少通信开销并简化状态信息。该平台的设计采用了多态方法,以实现模块化和鲁棒性,从而促进未来的发展。
成为VIP会员查看完整内容

相关内容

Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日