近年来,无人驾驶飞行器(UAV)越来越受欢迎[1-3],尽管事实上无人驾驶飞行器的历史发展始于 19 世纪中期[1]。根据 Cifaldi 等人的研究,最早的遥控飞机系统(RPAS)可以追溯到 19 世纪中期[4]。
Zhao 等人注意到,有关无人机路径规划的论文数量有所增加。从 2008 年开始的前 7 年中,增长率略有上升。在 2014 年至 2016 年期间略有波动。不过,他们报告称,2017 年和 2018 年出现了更显著的增长[5]。
Pehlivanoglu 等人认为,当无人机实现根据环境智能修改内部计划的能力时,它们将更有效、更经济。路径规划,尤其是自适应路径规划,是可从增强自主性中受益的领域之一 [3]。因此,路径规划和轨迹生成都是无人机系统(UAS)发展的基础领域。两者都提供了在一系列约束条件下高效、安全地穿越环境的能力[6]。
需要注意的是,障碍物不仅仅是固体物体。天气条件在航空中也扮演着重要角色。Garcia 等人认为,复杂的天气条件导致了许多致命的飞机事故。此外,与有人驾驶飞机相比,无人机更容易受到不利天气的影响,这主要是由于无人机通常体积较小。因此,避免危险的天气条件是无人飞行的一个关键问题[7]。
Dhulkefl 等人在 2020 年的著作中强调了无人机在过去 10 年中受到的极大关注--包括军事和民用应用[1]。无人飞行器乐于执行被认为是不必要的、重复性的或对有人操作来说过于危险的任务[6]。
引入作战无人机是现代航空武器装备的明显趋势之一[8, 9]。正如 Ling 和 Hao 所指出的,越来越多的无人机被用于执行军事任务。这些任务包括目标探测、目标摧毁、近距离侦察、精确轰炸、高清记录、电子战和损害评估[3, 9]。当代无人机通常用于跟踪、保护或监视地面飞行器 [10]。多架无人机组成的护航编队尤其适用于这项任务 [11]。对无人机的研究被认为是空军战斗力的基础,因此与国家安全密切相关 [8]。
民用无人机的应用在欧洲尤其流行。根据 Cifaldi 等人的研究,2016 年 4 月,欧洲有 2500 名操作员,而世界其他地区有 2342 名操作员。此外,他们认为,据估计,无人机行业的价值可能占航空市场的 10%。预计到 2035 年,需求量将达到每年 100 亿欧元,到 2050 年将超过每年 150 亿欧元[4]。民用应用包括侦察、搜救、气象观测、航空测绘和电影拍摄等目标[3, 6]。此外,建筑工地上的无人机可提供持续监测,进入难以到达的危险区域,并支持灾后重建[12]。
然而,这些任务中有许多都受到燃料箱或电池容量的限制。因此,许多无人机采用太阳能供电。高空长航时(HALE)无人机是这类飞行器的一个分支。高空长航时无人机是设计用于在大气层飞行区域以上、航天器飞行区域以下(约 20 至 100 千米)飞行的高效无人机[13]。根据平台的效率和阳光条件,它们有可能无限期地停留在空中。此外,由于其机动性,它们是气球和飞艇的重要替代品。高空无人机既可以作为测量平台,也可以作为卫星。因此,它们也被称为高空伪卫星(HAPS)[13]。
20 公里处的大气密度不到海平面的 10%。可用于提升飞机的动压微乎其微,只能通过高速度来补偿[13]。因此,对于电池容量相对较小的流线型飞机来说,达到这样的高度是一项挑战。尽管如此,最终达到这样的高度还是可以获得近乎无限的太阳能。自 1974 年首次太阳能飞行 "日出号"(Sunrise)[13]以来,这一承诺激励着多个科学家团队开发此类飞行器。
本论文试图解决固定翼气象测量平台,尤其是高空无人机中存在的一些问题。论文提出了一种两级自适应路径规划器(APP),可为此类飞行器提供优化路径。该路径必须确保任务的安全性和可靠性。要使路径可行,还必须遵守无人机的约束条件。因此,APP 会考虑避开障碍物,并根据最小的能量消耗和有利的风力条件优化路径。
1.1 科学背景和动机
本论文与国际项目 "高时空分辨率长航时无人机收集空气质量数据"(LEADER)的主要任务直接相关。该项目的目标是开发高空长航时(HALE)无人机,作为移动研究平台,通过气溶胶采样测量等方法测量大气成分[14]。欧盟关于黑碳(BC)的综述[15]强调了从船舶或飞机上进行观测在了解长程飘移的独特过程中所发挥的作用。
森林大火以及对流层顶区域空中交通造成的烟尘是 BC 迁移的主要来源[14]。Gilardoni 等人在他们的报告[16]中将 BC 定义为 "亚微米气溶胶粒子的一种成分",它 "通过吸收进入的太阳辐射(直接效应)、改变云的分布及其辐射特性以及在沉积后降低冰雪表面反照率来影响区域辐射平衡"[16]。
不过,[15] 的作者指出,与生物多样性观测相关的密集实地活动成本极高。因此,为调查 BC 的来源、汇和传输提供一个高能效、主要是自主的、因而相对便宜的科学平台变得至关重要。此外,这将有助于更好地了解自然和人为气溶胶的迁移如何影响云及其特性[14]。
LEADER 项目解决了这些问题并提出了建议。该项目是对波兰国家研究与发展中心资助的应用研究计划 POLNOR 2019 号召的直接响应。该项目由西里西亚理工大学(SUT,波兰)与挪威研究中心(NORCE,挪威)、华沙大学(UW,波兰)和 SkyTech ELAB Sp. 该项目涉及多个学科,包括工程与技术、机械工程和航空航天工程[14]。项目期间执行的任务根据地理区域分为两类。
1.1.1 在波兰的任务
LEADER 项目考虑的波兰任务重点是评估 HALE 无人机及其设备的性能。这些飞行任务将在波兰南部的选定区域进行,以测量污染物的空间分布,即
-
寒冷季节行星边界层(PBL)中的烟雾分布。
-
春夏季对流层中上层(15 公里以内)的生物质燃烧和矿物尘埃事件。
-
气溶胶通过行星边界层的垂直传输[14]。
烟雾分布
波兰的烟雾是一个令人担忧的主要问题,特别是由于冬季供暖系统燃烧硬煤造成的排放增加。以前的研究提供了低空烟雾浓度的信息。然而,特大城市和农村地区的三维气溶胶分布仍是未知数。为此,计划进行低空飞行,即飞行高度在 1-2 公里以内,以测量垂直和水平梯度。由于波兰的法律规定[14],这些飞行将主要在中欧无人机演示器(CEDD)上空进行。
生物质燃烧和矿尘事件
生物质燃烧和矿物尘埃飘移通常发生在对流层中上层。因此,HALE 无人机的飞行距离预计在 3 千米到 12-15 千米之间。与烟雾分布不同的是,这种飘移通常是在大范围内观测到的,因此可以在波兰的任何地区进行测量。此次测量的策略将侧重于垂直剖面而非水平梯度飞行[14]。
对生物质燃烧和沙尘事件的测量可在春季和夏末进行。春季的生物质燃烧源通常是乌克兰和俄罗斯(加里宁格勒州)的草地火灾。夏季,森林野火是主要来源,可在对流层上部和平流层下部观测到来自乌克兰、西伯利亚、加拿大和美国的长程飘移[14]。
气溶胶的垂直迁移
气溶胶的垂直传输将在自由大气和 PBL 之间进行测量。无人飞行器将主要在对流层低层飞行,因为 PBL 的高度通常在 0.5 至 2.5 千米之间。与以往的测量目标不同,气溶胶垂直传输测量不受季节限制。与生物质燃烧一样,测量的精确定位并不重要[14]。
研究将以水平或垂直剖面的方式进行。水平剖面旨在测量对流层下部(2.5 公里以内)污染浓度的水平梯度。垂直剖面的重点是了解污染浓度变化与热力学参数之间的关系。无人机进行的测量将与移动实验室进行的地面观测结合使用[14]。
1.1.2 北极任务
LEADER 项目的北极任务将侧重于研究短期气候作用力(SLCFs)对气候的作用。例如,AMAP 评估[17]指出北极东部地区缺乏 SLCF 测量。
任务将在斯瓦尔巴群岛(挪威)上空进行。主要关注区域包括 Ny-˚Alesund 周边地区、Holtedahlfonna 和 Kongsvegen 冰川(图 1.1)以及斯瓦尔巴群岛东部地区[14]。
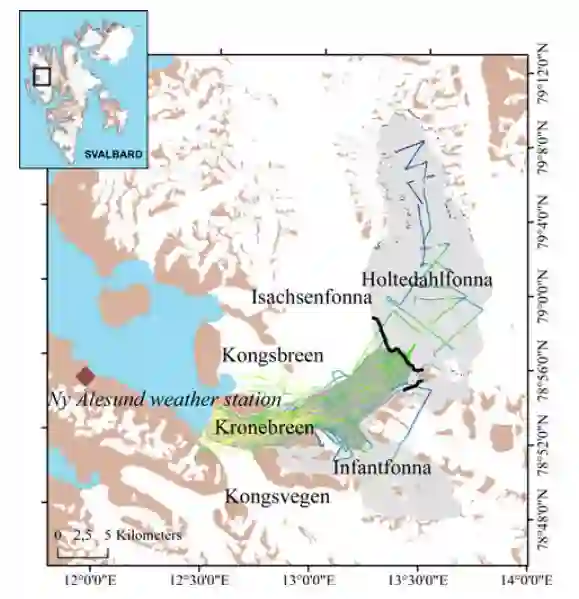
图1.1: 在斯瓦尔巴群岛发现的冰川[18]
LEADER 项目的范围包括北极地区的多项测量,例如
-
BC 浓度的剖面和空间变化。
-
气溶胶成分,用于验证来源,然后将森林火灾与非人为来源进行比较。
-
云凝结核。
-
气象参数,如温度和相对湿度。
-
大气湍流和辐射[14]。
1.2 目的
论文的目的是设计和验证基于模型的自适应路径规划算法,该算法适用于在有限环境中自主飞行的高空无人机进行污染采样。该算法的设计原则必须使其能够部署在为 LEADER 项目设计的无人机系统中。
1.3 科学问题
为了进行污染测量,尤其是在较高海拔地区,为 LEADER 项目开发的高空无人机需要长时间停留在空中。然而,无人飞行器的能源资源非常有限,而且与多旋翼飞行器等相比,飞行器受到的运动学限制要严格得多。因此,为了满足项目的要求,必须优化无人机的飞行路径,使能量消耗最小,同时又能满足高空飞行器的运动学限制。优化还必须考虑到无人飞行器所处的环境,以尽量减少风的不利影响,避免与潜在障碍物发生碰撞,这就需要建立环境模型。此外,任务期间环境可能会发生变化,因此规划器必须具有自适应能力。根据这些要求和限制,确定了以下科学任务:
-
为污染采样制定基于模型的自适应路径规划算法的理论基础。
-
制定环境模型的理论基础,该模型考虑了对飞行安全和节能非常重要的场景组成部分。
-
定义多标准优化问题,考虑避障、最小能量消耗、测量策略和 HALE 飞机的运动学约束,并在基于模型的模拟中验证结果。
-
确定优化标准并制定目标函数。
-
比较几种不同的路径规划和优化算法,找出节能自适应路径规划的最佳算法。
-
比较算法生成的路径和人类专家提供的参考路径所测得的能量消耗。
-
在需要动态重新规划路径的类似 LEADER 项目中描述的使用案例中模拟验证自适应路径规划算法。
1.4 范围
本论文侧重于基于模型的无人机自适应路径规划(APP),特别是其在高空飞行器污染采样中的应用。APP 算法的特点是在无人机飞行时动态重新计算飞行路径,以适应不断变化的任务参数,如天气条件或新障碍物的出现。需要注意的是,APP 并非用于处理危险天气条件下的飞行--其任务是适应环境以避免出现此类场景。
论文探讨了机械工程领域的许多问题,包括基于模型的新型自适应路径规划算法的正式描述、最小估计能量消耗的优化、无人机及其环境的建模,以及验证研究,其中采用了环内模型(MIL)模拟。
第 1 章介绍了论文中提出的科学问题及其动机和科学背景。该章还介绍了 LEADER 项目以及本论文中考虑的一些测量场景。
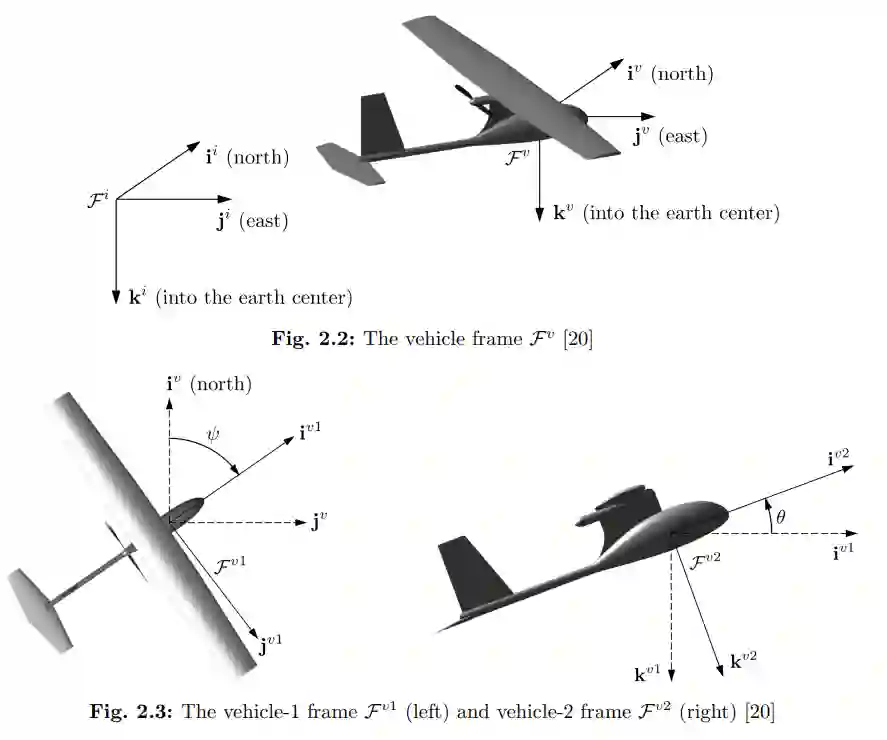
第 2 章介绍了固定风力无人机建模的基本原理,如协调框架、风三角和杜宾斯飞机路径。此外,还介绍了飞机的几个简化制导模型(四个运动学模型和一个动力学模型)。值得注意的是,虽然 LEADER 项目也涉及开发 HALE 飞机的完整非线性动态模型,但这是由其他团队负责的任务。因此,这超出了本论文的范围。
第 3 章介绍了环境地图的概念,环境地图用于对场景的关键组成部分进行建模。为此,提出了四个不同的模型(地图):地形图、风向图、空域图和测量图。
第 4 章正式介绍了基于模型的 APP 算法及其组成部分。首先,讨论了路径规划中适应性的一般概念。然后,给出了 APP 的一般形式,说明了基于模型方法的作用。随后,分别介绍了 APP 的组成部分:全局路径规划器(GPP)和局部路径规划器(LPP)。全局路径规划器采用全局优化算法来解决一个多标准问题,即提供一条可行的路径,以优化能量消耗最小化。LPP 采用快速随机算法,在紧急情况下提供备用路径。该路径必须无碰撞,并受无人飞行器运动学约束条件的限制,但其最优性会因计算性能而被牺牲。
第 5 章简要介绍了对环境和无人机模型的验证研究,以及在仿真中对 APP 进行的大量基于模型的验证测试。第一部分比较了地形图的不同实现方式,并验证了风图。第二部分的重点是 GPP。对全局优化标准的效果进行了独立验证。然后,在 MIL 仿真中比较了各种单目标全局优化算法,并为 GPP 选择了最优解。第三部分是对 LPP 的广泛测试,包括比较不同的基于 RRT 的算法,选择最优算法,然后在具有挑战性的环境地图上进行校准。接下来,LPP 在一系列需要自适应重新规划的使用案例中进行了验证。最后,APP 在 LEADER 项目启发的两个任务场景中进行了验证。
最后几页对研究进行了总结,同时重点介绍了作者在建模和基于模型的自适应路径规划方面的贡献。之后提出的详细结论和对未来工作的考虑为论文画上了句号。
附录 A 包含与路径规划、优化和自主相关的部分术语定义,这些定义对论文非常重要。
附录 B 简要分析了不同路径规划和全局优化算法的最新进展。第一部分侧重于路径规划算法--包括精确算法(Dijkstra's、A*、D*)和随机算法(RRT 和 RRT*)。第二部分介绍选定的全局优化通用算法(GA、PSO、ACO 和 I-GWO)。