【CMU博士论文】基于可编程光幕的主动机器人感知,120页pdf
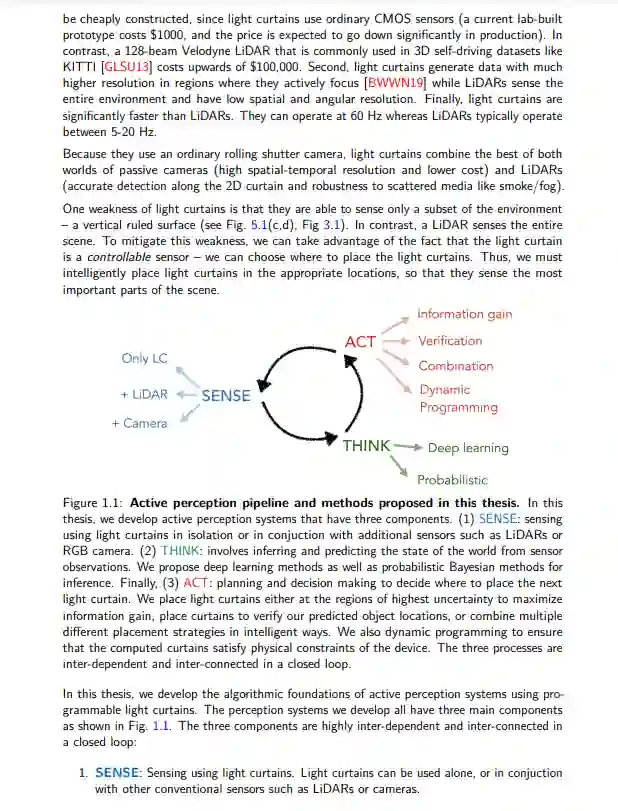
本文为利用可编程光幕进行机器人主动感知奠定了算法基础。我们研究了光幕在各种感知任务中的使用,如3D对象检测、深度估计、障碍物检测和规避以及速度估计。首先,我们将光幕的速度和加速度约束合并为约束图;这允许我们计算可行的光幕,优化任何特定任务的目标。然后,我们开发了一套算法,使用各种工具,如贝叶斯推理、深度学习、信息获取和动态规划,智能地在场景中放置光幕。
最后,我们在一个在线学习框架中结合了多种智能放置策略。首先,我们能够使用基于粒子滤波和占用网格的贝叶斯滤波技术显式估计场景点的速度和位置。然后,我们提出了一个新的自监督奖励函数,评估当前速度估计的准确性使用未来光幕布局。这种洞察力使在线多臂盗匪框架能够在多个放置策略之间实时智能切换,优于单个策略。这些算法为可控光幕准确、高效、有目的地感知复杂动态环境铺平了道路。

专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“R120” 就可以获取《【CMU博士论文】基于可编程光幕的主动机器人感知,120页pdf》专知下载链接


登录查看更多
相关内容
Arxiv
14+阅读 · 2021年2月14日


相关VIP内容
相关资讯
相关论文
Arxiv
14+阅读 · 2021年2月14日