《人机协同决策》252页论文
引言
1.1 在人机协作系统中实现协作决策
1.2 研究贡献
-
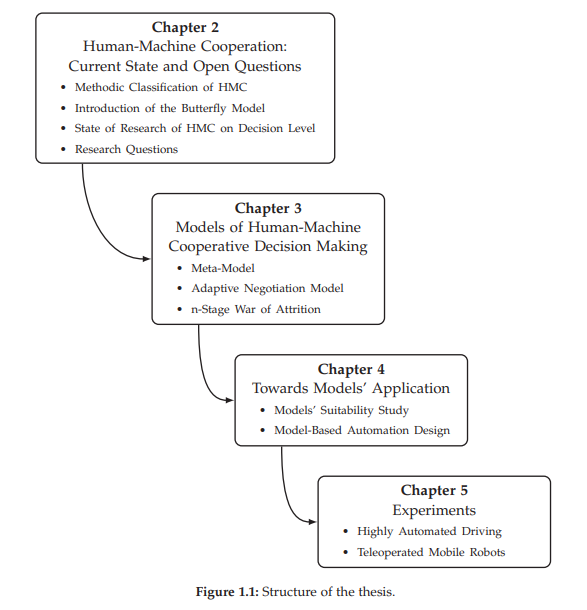
第4章报告了关于这两种数学行为模型是否适合代表人类的特许行为的研究。此外,基于所提出的模型,介绍了两种自动化设计,并讨论了其实际应用的关键方面。 -
第5章建立了一个侧重于人机协作决策的一般实验设计,以及评估客观合作性能和人类主观感知的适当措施。在此基础上,在同一章中提出了两个能够进行人机协作决策的自动化设计的实验评估。实验是在远程操作具有多级自主性的移动机器人和引导高度自动化车辆的背景下进行的。这些实验评估首次证明了解放后的人机协作在决策层面的客观和主观效益。
便捷下载,请关注专知智能防务公众号(点击上方关注)
点击“发消息” 回复 “CDM252” 就可以获取《《人机协同决策》252页论文》专知下载链接



登录查看更多
相关内容

Arxiv
0+阅读 · 2023年5月30日
Arxiv
0+阅读 · 2023年5月27日
Arxiv
0+阅读 · 2023年5月27日
相关VIP内容
相关资讯