

本文论述了无人飞行器(UAV)日益重要的意义,以及无人飞行器群在各个领域协同作战的出现。然而,无人飞行器群的效能可能会受到干扰技术的严重破坏,因此必须采取强有力的抗干扰策略。虽然人们已经探索了跳频和物理路径规划等现有方法,但无人机群在干扰者位置未知时的路径规划研究仍是空白。为解决这一问题,提出了一种新方法,即无人机群利用集体智慧预测干扰区域、躲避干扰并高效到达目标目的地。这种方法利用图卷积网络 (GCN) 根据从每个无人机收集到的信息预测干扰区域的位置和强度。然后采用多智能体控制算法分散无人机群,避开干扰,并在到达目标后重新集结。通过模拟,证明了所提方法的有效性,展示了对干扰区域的准确预测,以及通过避障算法成功规避干扰,最终实现任务目标。所提出的方法具有鲁棒性、可扩展性和计算效率,适用于无人机群在潜在敌对环境中工作的各种场景。
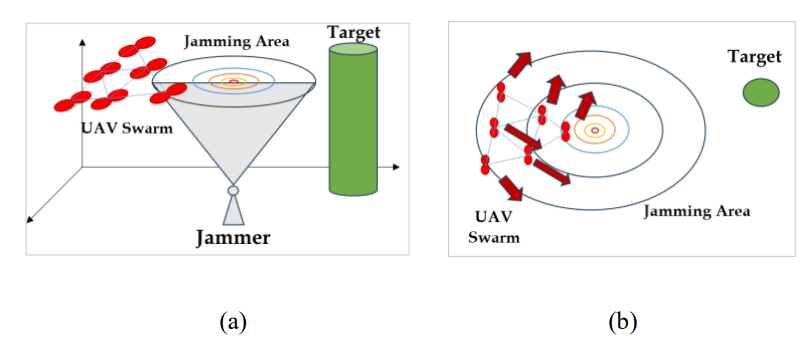
图 1:模拟环境概览:(a) 由六架无人机组成的多无人机以三角形编队飞向目标的情况;(b) 如图 1(a)所示,但从地面上看情况与图 1(a)相同。干扰区域表示受干扰器发射的干扰信号影响的区域。在干扰区域内,干扰信号的强度会对无人飞行器的通信状态产生重大影响,在靠近中心的位置观察到的影响更大。
成为VIP会员查看完整内容
相关内容

Arxiv
152+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
152+阅读 · 2023年3月29日