
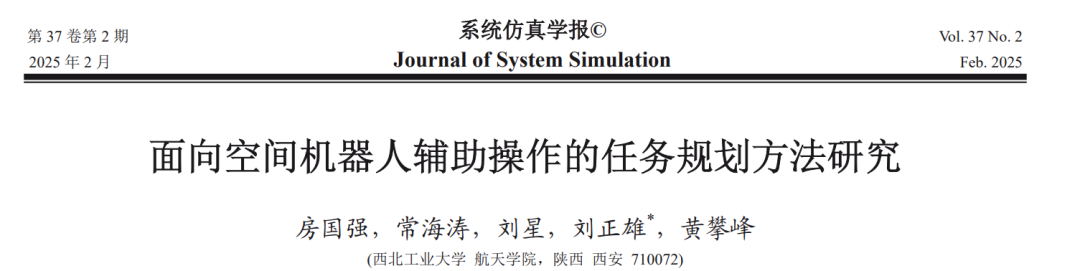
针对空间机器人辅助操作时任务流程复杂、任务约束众多,导致任务规划困难的情况,提出了一种快速前向搜索算法和分层网络算法相结合的任务规划方法。将空间辅助操作任务规划过程分为任务规划和重规划。基于操作代价的快速前向搜索任务规划方法,得到操作代价最小的动作执行序列;基于分层网络的任务自适应重规划 方法 ,根据问题排列移动、抓取、释放的修正补偿优先级对问题修正补偿。针对空间机器人在轨辅助加注任务进行了对比仿真,得到了操作代价最小的动作序列,并采用重规划算法解决了任务执行过程中环境信息变化导致的错误,验证了算法的有效性,为空间辅助操作提供了一种有效的任务规划方法。 关键词: 空间机器人, 任务规划, 重规划, 快速前向搜索,
成为VIP会员查看完整内容
相关内容
Arxiv
223+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
223+阅读 · 2023年4月7日