
关于远征先进基地行动以及这一概念将如何影响美海军陆战队未来行动的争论十分激烈,而且仍在继续。而关于海军提出的分布式海战作战(DMO)概念的讨论则要少得多。迄今为止,海军尚未在整个舰队中推行分布式海战作战的愿景。如果希望指挥官在大国冲突中执行这一概念,就必须确定、讨论并减轻分布式海战作战固有的技术、战术和认知挑战。

图:2020 年 1 月 22 日,驱逐舰中队 23 的舰艇在太平洋上航行。分布式海上作战概念给战术层面带来了挑战。值得庆幸的是,大自然提供了一个范例--椋鸟群。美国海军 (erick parsons) & shutterstock
分布式海上作战(DMO)
美海军于 2018 年在海军作战部长约翰-理查森(John M. Richardson)的《维护海上安全设计》(2.0 版)中首次提出了分布式海战作战(DMO),供广泛审议,尽管这一概念参考了早期的作战框架,如网心战和分布式杀伤力。随后的文件提供了舰队层面的可视化模型,但为单个战术指挥官提供的信息很少。这些描述侧重于概念运作所需的高度连通性,即使只是通过传感器、平台和指挥控制元素之间的静态连接线。
关注舰队作战新模式在战争战役层面的 "外观 "及其技术要求是合理的,也是可以理解的。分布式海战作战要求在不同的平台和传感器之间实现指挥控制和数据共享,以建立共同的作战图景。开发执行这些概念的技术架构无法从单个战术平台向上扩展。要建立与平台无关的通信、指挥控制和火控网络,就必须在整个部队范围内建立高水平的专用连接和互操作性。

现代挑战
尽管分布式海战作战的技术挑战令人生畏,但与指挥官在理解、更不用说应用所获信息方面所面临的挑战相比,就显得微不足道了。纵观历史,指挥官一直面临着在信息不足的情况下做出决策的挑战。现代冲突可能会给指挥官带来相反的挑战:在信息过多的情况下做出决策。
信息过载并非现代现象,大多数历史学家认为约翰内斯-古腾堡(Johannes Gutenberg)发明的印刷机是信息过载在现代的首次表现。随之而来的图书爆炸让 15 世纪的学者们应接不暇。同样,大量的平台、传感器和武器数据也会让 21 世纪的指挥官应接不暇。
有点违反直觉的是,另一种新兴技术可能会有所帮助。美国国防部正在利用人工智能(AI)改善军事决策。然而,海军在将人工智能纳入其采购流程和网络基础设施,以及派遣一支随时准备开发和使用人工智能的部队方面却举步维艰。此外,海军还必须应对一个更为紧迫的技术挑战:信息必须可靠地到达作战决策者手中。
美国期待大国在整个电磁频谱(EMS)范围内作战。尽管电磁频谱通常被认为有别于物理域(陆、海、空),但战区几何学的基本原理依然适用;部队(或信号)在远离自己的作战基地(或传输源)的地方作战会处于劣势。较长的通信线路会增加敌方行动干扰的风险,增加用于保护的资源需求,减少可用于进攻行动的兵力和时间。太平洋地区辽阔,保护和恢复美国进入 EMS 所需的部分是一项巨大的挑战。进入该地区永远不会有保障或无争议。
脆弱性
分布式海战作战中的技术漏洞很容易识别。分布式海战作战给战术指挥官带来了更为隐蔽的认知漏洞。美国海军和英国皇家海军的前身在历史上都曾寻求改进通信技术,以提高指挥和控制的效率。无论是在 1916 年的日德兰海战,还是 1942 年的萨沃岛一战,这两支海军在引入通信技术后都出现了主动性下降、决策瘫痪加剧的问题。两次行动中的战术指挥官在面对有限的信息时都未能发挥主观能动性,部分原因是他们认为上级掌握了更多的信息。没有多少历史资料表明,今天的分布式海战作战概念会带来明显不同的结果。
将 DMO 的基本概念(部队的分解和传感器/武器数据的分布式海战作战)集中在战术层面,可减轻战役层面的技术和决策漏洞。它缩短了 EMS 的通信线路,并将技术工作重点放在在战术相关距离的平台之间分配传感器/武器数据上。它减少了对天基通信和情报、监视和侦察(ISR)的依赖,而这些很可能会成为大国海军的主要目标(就像俄罗斯目前在乌克兰冲突中的目标一样)。它承认信息方面仍然存在巨大差距。最重要的是,它让远洋指挥官做好准备,在缺乏高层领导进一步指导的情况下执行任务。欧内斯特-J-金上将在《1944 年美国海军战争指示》中强调了人的主动性和无线电静默。这两点在今天同样有效。

图:美国海军巴里号(DDG-52)在一次正在进行的补给中接近美国海军拉帕汉诺克号(T-AO 204)。分布式海上作战等动态概念的可视化面临挑战,因此很难实施。大自然提供了可供借鉴的范例。美国海军(格雷格-约翰逊)
可视化心智模型
分布式海战作战仍然需要一个可视化心智模型,而三个不同的问题使得建立一个可视化心智模型十分困难。首先,"分布式 "的定义是共享还是分散?多个战术平台在很远的距离上运行(分散的部分)排除了有用的表征甚至认知。认知心理学家乔治-A-米勒(George A. Miller)认为,大多数人类一次只能处理大约七块相互影响的信息。决策者将四艘驱逐舰、两艘巡洋舰和一艘航空母舰重新编码为一个航母打击群。对于缺乏明确连接点的非聚合平台来说,这一过程更加困难。
可视化的第二个障碍是,动态概念的静态表述是无效的。最后,如果没有明确的目标,平台与传感器之间的关系就毫无意义。那么,海军应如何为战术领导人提供分布式海战作战的可视化模型呢?
大自然提供了一个潜在的有用模型。椋鸟的编队不同于迁徙大雁相对静止的 "V 形编队",它是异常动态的,同时又是连贯的。椋鸟编队会在短暂的时间内集中,然后调整方向,沿着新的轴线延伸,溃散,再延伸。
2013 年,普林斯顿大学机械工程师纳奥米-伦纳德(Naomi Leonard)研究了数百小时的椋鸟镜头和机械模型,以确定编队是如何工作的。伦纳德的研究得出结论,椋鸟表面上的大规模集结实际上是多个较小的局部集结的集合体。随后的研究确定,每个局部形成只与三个变量有关:
1.吸引区: 在这一区域,椋鸟会飞近其编队的成员。
2.排斥区: 在这一区域,椋鸟飞得更近会影响安全飞行。
3.角度关系: 椋鸟近似于编队中最近成员的飞行路线。
此外,每只椋鸟的七个近邻决定了每个地方的编队(米勒的七块可处理信息的限制显然可能并不局限于人类)。最后,在整个飞行过程中,编队成员会不断变化;距离远近是唯一的决定性标准。流畅的局部编队和伦纳德的三个参数为在战术层面实施分布式海战作战提供了指导。在战术交战中,分布式部队根据其与目标或目的的相对距离建立临时的、无定形的编队。它们根据自身易被发现的程度确定排斥区。它们根据共享传感器覆盖范围或武器使用考虑因素确定吸引区。
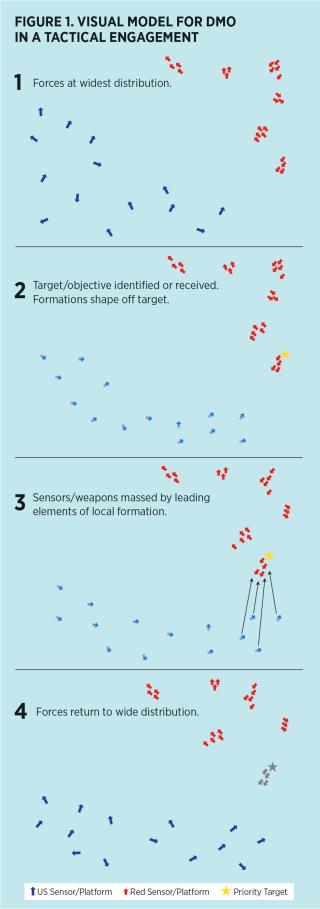
在图 1 第 1 帧中,海军部队分布最广。他们根据距离的远近建立机会主义网络,进行有机侦察,并避免被发现。在框架 2 中,这些部队在机会性通信窗口期间通过任务类型命令接收任务,或在发现敌军后发起攻击。部队利用上述三个变量向目标或目的流动。在框架 3 中,最近的部队确定总的攻击轴线和到达目标的时间。尾随和远距离部队则重点掩护攻击部队,并在被发现时用武器和传感器保护攻击部队。实施攻击后,这些部队在第 4 帧返回广泛分布区,并在下一个机会通信窗口报告武器效果和武器消耗情况。在每一帧中,部队都会关注自身平台与最近的相关平台之间的相对关系。
分布式海战作战的执行
在战术层面执行分布式海战作战是一项复杂的工作。和平时期建立的任何使用模式在作战期间都需要进行重大调整。建立临时作战编队需要大量的信任和跨平台理解。它对精神的要求更高;在编队中没有固定的 "就位 "标准。指挥官必须在无法完全访问 EMS 的情况下,评估部队之间的接近程度及其与敌方威胁的个体和集体关系。此外,针对机会战术目标使用的平台可能会偏离更大的作战目标。作战指挥官可能希望对这些平台和能力进行集中指挥和控制,但如果不能保证进入 EMS,集中分布式海战作战就会失败。
大国都拥有先进的 ISR 能力,因此有必要在各平台之间进行分解和合作。大国利用先进 ISR 系统提供的目标数据,将发射大量中程弹道导弹,使美国海军的舰载机防御能力不堪一击。为了应对这种导弹威胁,美国和盟国海军部队将进行分解,以防止被发现和摧毁。这些分散的部队仍然需要聚集战斗力,而且必须能够在有争议的 EMS 中做到这一点。海军应追求技术能力,使分布式海战作战在执行中具有致命性。海军还必须在舰队范围内寻求并确立对战术级领导者而言分布式海战作战意味着什么的理解。
参考来源:美国海军研究所,Captain Tom Clarity
