
本论文阐述了一种新型无人机(UAV)飞行控制器FARN的功能原理,该控制器专需高精度可靠导航的任务场景而设计。通过融合低成本惯性传感器、超宽带(UWB)无线电测距以及全球导航卫星系统(GNSS)原始观测值与载波相位数据,系统实现了所需精度要求。该飞行控制器基于两项科研项目的任务需求开发,并在实际环境中完成验证。
FARN集成GNSS罗盘功能,可在地磁罗盘不可靠环境下实现精确航向估计。该技术通过融合双GNSS接收机原始观测数据与实时姿态解算能力,使得在ROBEX项目北极科考任务中,即便地球磁场水平分量微弱仍能保障无人机可靠运行。
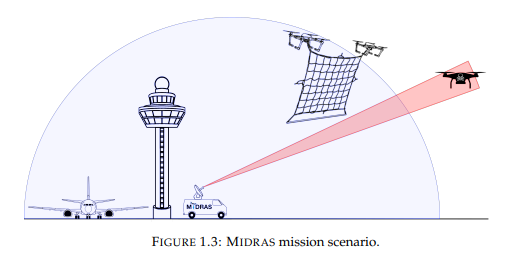
此外,FARN支持多无人机厘米级实时相对定位,既实现蜂群内精准机动飞行,也支持多机协同作业——包括目标协同或物理耦合任务。结合MIDRAS项目,开发了双机协同防御系统:两架无人机通过协调动作操控悬挂网具,实现空中危险目标捕获。
本研究涵盖无人机研发的理论与实践层面,重点涉及信号处理、制导控制、电气工程、机器人学、计算机科学及嵌入式系统编程等领域。同时为后续无人机研究提供系统性参考框架。
研究工作详细建模并描述了无人机平台构型、推进系统、电子设备架构及传感器配置。建立姿态表征数学规范后,重点阐释飞行控制核心——嵌入式自运动估计框架及控制架构原理。基于基础GNSS导航算法,推导出进阶载波相位处理技术及其与自运动估计的耦合机制。系统阐述各模块实施细节与优化策略,并在两项科研项目中完成部署验证。通过系统性能的批判性评估,明确现有技术边界并提出改进方向。
成为VIP会员查看完整内容
相关内容

Arxiv
37+阅读 · 2023年4月19日
Arxiv
203+阅读 · 2023年4月7日
Arxiv
78+阅读 · 2023年4月4日
Arxiv
138+阅读 · 2023年3月29日


相关VIP内容
相关资讯
相关论文
Arxiv
37+阅读 · 2023年4月19日
Arxiv
203+阅读 · 2023年4月7日
Arxiv
78+阅读 · 2023年4月4日
Arxiv
138+阅读 · 2023年3月29日