本报告介绍了用于基于事件的视觉惯性里程测量的机载事件传感器的性能和结果,项目名称为 Have T-Rex。测试由俄亥俄州赖特-帕特森空军基地空军技术研究所自主导航技术中心(AFIT/ANT)要求进行。开发测试的牵头机构是加利福尼亚州爱德华兹空军基地的空军测试中心。执行测试机构是第 412 测试联队。测试由美国空军试飞员学校 20A 班在加利福尼亚州爱德华兹空军基地进行,是学生测试管理项目的一部分。测试于 2020 年 9 月 8 日至 2020 年 9 月 21 日进行,包括驾驶编号为 87-0377 的 F-16 进行 21.4 个小时(13 架次)的飞行测试,以及驾驶 T-38C 作为空中目标进行 2.2 个小时(2 架次)的飞行测试支持。
全球定位系统(GPS)是军事和商业定位、导航和定时应用的关键。全球定位系统的导航性能取决于能否可靠、无障碍地接收低功率卫星信号。这些信号很容易受到干扰或欺骗。AFIT 自主与导航技术中心已投资于各种替代导航解决方案,以降低这种风险。基于事件传感器的视觉惯性测距(EVIO)导航就是其中一个研究领域。视觉里程计使用安装在车辆上的摄像头,通过识别和跟踪图像特征来估计车辆的运动。运动估算的准确性受到摄像机性能的限制,因为每秒低帧捕获率会错过帧间的关键信息,尤其是在快速运动时。另外,捕获率极高的相机需要更强的处理能力。
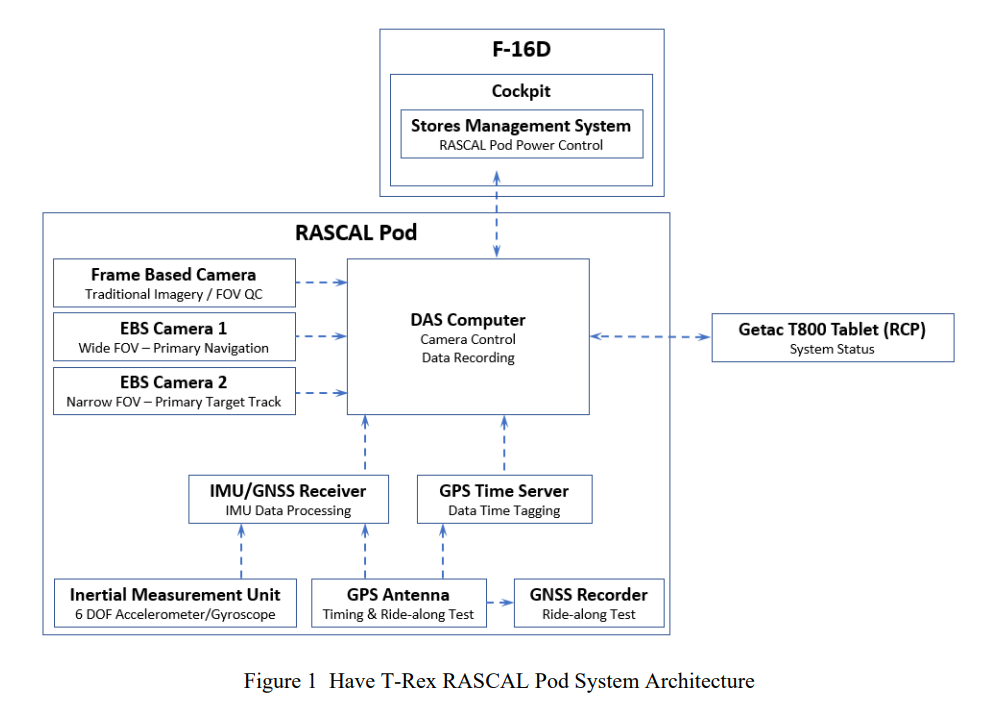
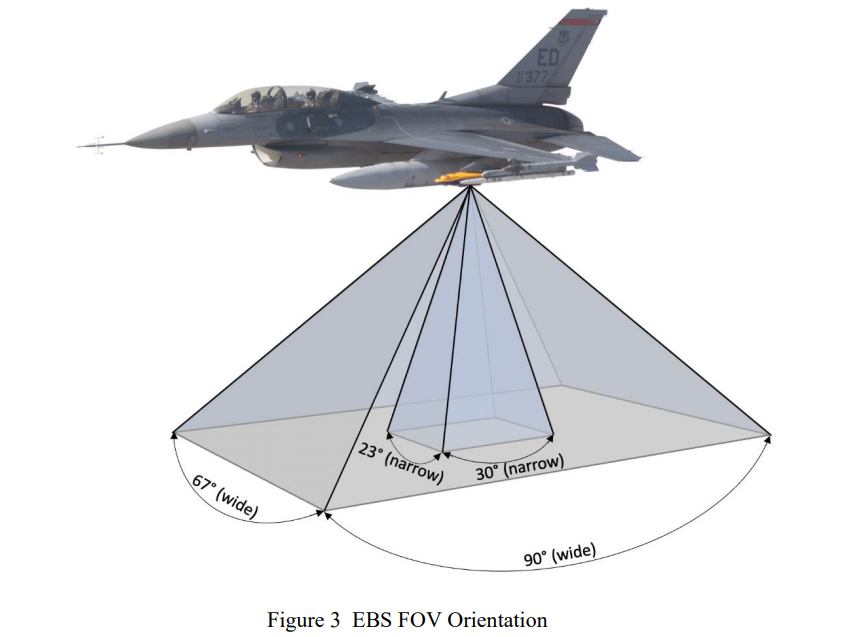
测试中的系统(SUT)包括基于事件的传感器(EBS)和惯性测量单元(IMU),安装在 F-16D 上的可重构机载传感器、通信和激光(RASCAL)吊舱中,以提高目视测距性能。EBS 通过硬件实现强度变化检测。这种操作理念提高了时间分辨率和动态范围,而且功耗低,有利于快速运动和低/变化的环境照明条件。SUT 的导航算法通过卡尔曼滤波器处理 EBS 图像来识别特征运动,并辅以 IMU 数据来预测飞机的位置、速度和姿态。SUT 算法尚未用于飞行中的导航估计;所有导航估计都是在飞行后进行的。
总体测试目标是确定 EVIO 算法的准确性,并收集数据以支持正在进行的目标探测和跟踪算法开发。具体的测试目标有四个:展示 SUT 生成导航解决方案的功能,确定不同飞行条件下导航解决方案的准确性,收集具有操作代表性的飞行剖面数据,以及收集目标跟踪数据用于未来研究。
数据是在不同高度(200 英尺到 20,000 英尺地面高度)和不同地面速度(250 节到 520 节)、不同地形(灌木丛沙漠、城市、山区、湖床)和环境照明条件(白天、黎明/黄昏和夜晚)下收集的。此外,还执行了俯仰和滚转机动,以确定动态机动的影响。最后,还针对空中和地面移动目标收集了数据。
所收集的数据显示,SUT 的精确度在视线率、环境照明条件、地形或动态机动方面没有明显的变化趋势。持续存在的极大解算误差阻碍了对这些因素如何影响 SUT 性能的适当调查。研究小组建议在继续进行飞行测试之前,调查并纠正 EVIO 算法精度方面的缺陷。结果表明,在测试的配置中,被测系统无法产生可靠或有用的导航解决方案。结果还显示,该系统能够探测空中和地面移动目标;但是,还需要进一步分析,以开发目标跟踪算法。