
本文介绍了 FARN 的功能原理,FARN 是一种新型无人飞行器(UAV)飞行控制器,专为需要高精度和高可靠性导航的任务场景而设计。通过将低成本惯性传感器和超宽带(UWB)无线电测距与全球导航卫星系统(GNSS)的原始和载波相位观测相结合,可达到所需的精度。飞行控制器是根据两个研究项目的任务要求在本工作范围内开发的,并在实际条件下成功应用。
FARN 包括一个全球导航卫星系统罗盘,即使在基于磁罗盘的传统航向估计不可靠的环境中,也能进行精确的航向估计。全球导航卫星系统罗盘将两个全球导航卫星系统接收器的原始观测数据与 FARN 的实时姿态确定功能相结合。因此,尽管地球磁场的水平分量很弱,但在 ROBEX 项目中,特别是在北极环境中部署无人驾驶飞行器是可能的。
此外,FARN 还能对多个无人飞行器进行厘米级精确的实时相对定位。这不仅能实现蜂群内的精确飞行操纵,还能执行合作任务,其中多个无人机具有共同目标或物理耦合。与 MIDRAS 项目一起开发的无人机防御系统基于两架合作无人机,它们以协调的方式行动,并携带一个共同悬挂的网,以捕获半空中具有潜在危险的无人机。
本论文涉及无人机开发的理论和实践方面,重点是信号处理、制导与控制、电气工程、机器人学、计算机科学和嵌入式系统编程等领域。此外,本论文还旨在为无人飞行器领域的进一步研究提供简明的参考资料。
该作品对所使用的无人机平台、推进系统、电子设计和所使用的传感器进行了描述和建模。在建立了姿态表示的数学约定之后,概述了飞行控制器的实际核心,即嵌入式自我运动估计和原理控制结构。随后,基于基本的全球导航卫星系统导航算法,得出了先进的基于载波相位的方法及其与自我运动估计框架的耦合。此外,还介绍了系统的各种实施细节和优化步骤。该系统已在两个项目中成功部署和测试。在对所开发的系统进行严格检查和评估后,概述了现有的局限性和可能的改进。
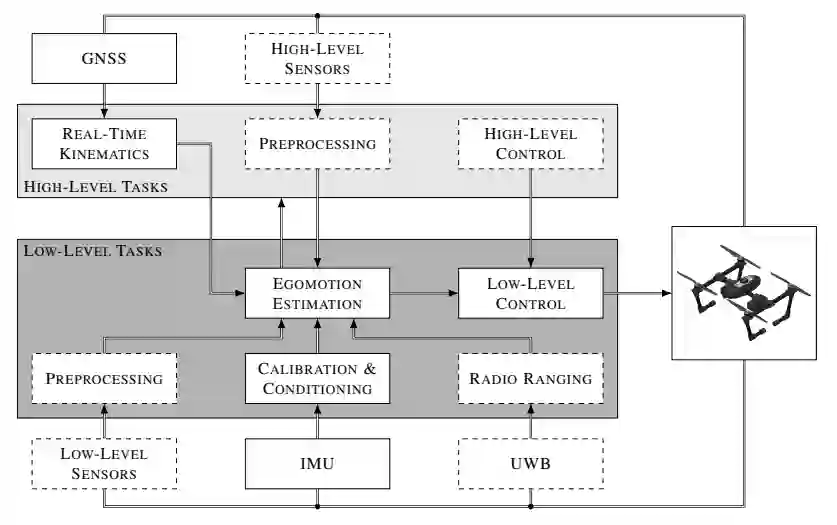
图:FARN 系统结构。可选传感器和任务用虚线表示。


