
本文提出了一个敏捷的协同模拟框架,用于开发新型飞行器的数字孪生原型。该框架能够在飞行器设计周期的早期阶段对其性能和飞行动力学进行快速评估。该框架将用于飞行动力学建模的MATLAB/Simulink环境与AGI STK Aviator任务模拟器整合为一个松散的计算回路。两个软件包的结合使飞机不仅可以从飞行动力学的角度进行评估,而且可以从GPS覆盖和雷达跟踪的整体任务角度进行评估。
这种虚拟飞行测试和评估框架的优势在于更快地开发新的飞行器,从设计周期的早期阶段就施加任务约束。在不同条件下的复杂任务场景中测试原型模型,可以及早发现设计的局限性,从而改善飞机的设计过程,减少进一步的设计成本。
本文最后以英国两个城市布里斯托尔和卡迪夫之间的民用eVTOL飞行模拟为例进行了总结。eVTOL的空气动力学建模是基于数值生成的数据查询表,而任务分析是基于飞机沿途的GPS和雷达监视能力。
在过去的几十年里,数字孪生(DTs)在航空航天工程中的逐步使用已经得到了证明。自NASA在阿波罗计划期间首次将数字孪生体引入航空航天领域以来,真实车辆的数字模型已经帮助解决了许多问题。2002年Grieves博士提出 "数字孪生 "一词后不久,NASA承认计算能力的进步,并将数字孪生确定为建模、仿真和信息技术领域的三大技术挑战[1]。最近城市空中交通(UAM)概念的兴起,其中电动垂直起降(eVTOL)飞机是最受欢迎的,计算能力的进步表明在飞机设计的早期阶段有可能使用数字孪生原型(DTPs)。DTPs允许预测 "所设计的产品在其高低公差之间变化的部件的行为,以确定所设计的产品符合拟议的要求"[2],并且也受到诸如波音等OEM厂商的青睐[3]。如果成功的话,在商业航空工程的历史上,这将是第一次允许在实际测试飞机被制造之前测试整体的飞机操控质量。这将允许更快和更便宜的认证过程,这对设计和制造eVTOLs的初创公司至关重要[4]。此外,这也可以减少军用飞机从设计到样机的时间尺度。
人们普遍认为,第一批eVTOLs虽然被设计成自主飞行器,但在之后的操作过程中,将以驾驶配置[5-6]和/或远程控制进行测试[4]。这意味着对新飞行器的飞行/操纵质量(FQs/HQs)和飞行性能的彻底分析对于确保飞行安全是最重要的。大多数eVTOLs被设计为像直升机一样起飞和降落,像飞机一样飞行,垂直和水平飞行之间的中间阶段称为过渡。HQ通常是作为认证的要求而建立的,例如,欧洲航空安全局对大型运输机的CS-25和欧洲航空安全局对大型直升机的CS-29。然而,民用飞机的HQ通常非常简短和灵活。这与军用飞机的总部要求相反[7-8],后者的定义更加精确,并以所谓的任务要素(MTE)为基础。MTEs能够将任务要素区分为不同的任务,如初始起飞、爬升、过渡等。此外,军事领域导致了垂直/短距离起降(V/STOL)飞机的FQs/HQs规范的发展[9-11]。最著名的是V-22鹗式飞机(螺旋桨驱动)和鹞式/F-35(都是喷气机驱动)。美国联邦航空管理局在认证阿古斯塔-韦斯特兰AW609倾转VTOL飞机时,使用了这些军事规格作为支持。民用飞机认证机构使用不同的方法进行eVTOL认证,即FAA使用所谓的混合方法,即要求来自于目前现有的法规,而EASA专门为小类VTOL飞机发布了特殊条件要求[12]。
上述讨论得出的结论是,目前的eVTOL认证法规是相当灵活的。因此,在2020年启动了研究项目[13],调查使用数字工具对新的eVTOL设计进行认证的潜力。本文提出了建模和仿真框架,以测试使用MTE的(e)VTOL飞机设计,作为定义飞行/操纵质量和飞行性能特征的手段。本文定义了所开发的框架、被调查的飞机、任务,并讨论了结果和建议框架的进一步发展方向。
建模和仿真框架
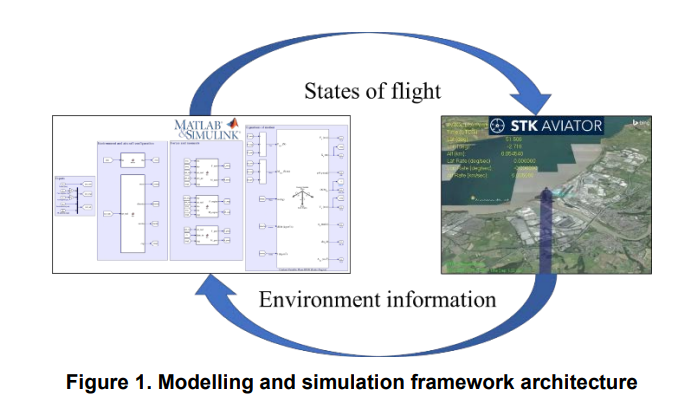
拟议的框架将用于飞行动力学建模的MATLAB/Simulink环境与AGI STK Aviator任务模拟器相结合。目前,该框架形成了一个松散耦合的计算回路,因为它需要在两个软件包之间手动传输数据。
图1展示了该框架的结构,并确定了两个软件包之间的数据流。MATLAB/Simulink为STK Aviator提供飞机状态,即姿态和位置,STK Aviator为飞机运行的环境建模。MATLAB/Simulink和STK Aviator的这种结合,可以从飞行动力学和整体任务的角度对飞机进行评估。例如,任务评估的一组目标可以是任务期间飞机的GPS覆盖和雷达跟踪。这个框架不仅可以评估飞机对预定任务的适用性,还可以在制造实际产品之前及时纠正设计问题。

