
通信、监视和交付无人机的自主导航和部署为无人机团队提供通信、监控、交付问题覆盖的权威资源**《通信、监视和交付无人机自主导航与部署》**研究了无人机(UAV)基站网络部署的各个要素,为灾区地面用户提供通信,涵盖了地面交通监控、环境灾区(如丛林火灾)监控、使用无人机执行救援任务、转换无人机视频监控等问题。该工作结合了实际问题,可实现的和计算高效的算法来解决这些问题,并在数学上严格证明每个算法的收敛性和性能。作者提供的一个这样的例子是一种新颖的仿生运动伪装算法,用于隐蔽无人机(UAV)对运动目标的视频监视。书中开发的所有自主导航和部署算法都是计算高效的,易于在工程实践中实现,并且仅基于每种无人机和环境的其他无人机的有限信息。工作中讨论的示例主题包括:
- 部署用于通信的无人机基站,特别是在最大化覆盖和最小化干扰方面
- 部署无人机对地面区域和目标进行监视,包括对平坦和不平坦地区的监视
- 无人机导航用于移动区域和目标的监视,包括灾区和地面交通监测
- 无人机自主导航用于隐蔽视频监控,提供广泛的优化导航覆盖
- 无人机与公共交通工具集成,实现单程和往返
- 导航和部署无人机的专业人员,以及交叉领域的研究人员、工程师、科学家,可以使用用于通信、监视和交付的无人机自主导航和部署,以获得该主题的一般知识,以及可部署在无数实际情况下的实用、精确和经过验证的算法。
HAILONG HUANG,博士,香港理工大学助理教授。他也是《国际先进机器人系统杂志》的副主编。主要研究方向为多机器人系统、覆盖控制;系统建模与仿真。ANDREY V. SAVKIN博士,澳大利亚悉尼新南威尔士大学电气工程与电信学院教授,系统与控制系主任。他是威利《移动机器人传感器和执行器网络的分散覆盖控制问题》(2015)的合著者。CHAO HUANG,博士,香港理工大学研究助理教授。从2020年7月到2021年5月,她担任Spectrum特刊“先进传感与控制的互联和自动化车辆”的客座编辑。
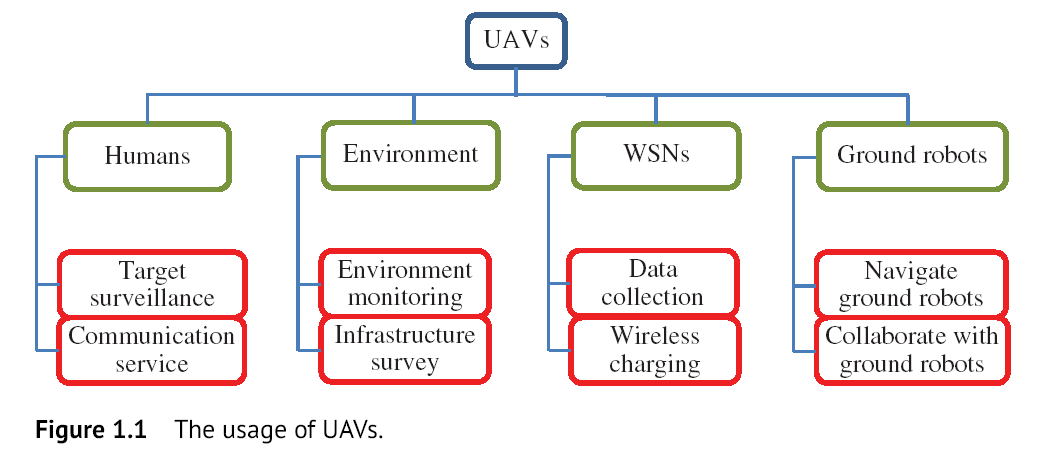
无人机(Unmanned aerial vehicles, uav),又称空中无人机,凭借其机动性、灵活性等固有属性,已经开始重塑我们的现代生活。一旦国家立法允许无人机自主飞行,成群的无人机将在我们的城市上空执行各种任务:救援行动、监视和监控,以及一些新兴应用,如货物运输和电信。
这本书主要是一本研究专著,以详细和统一的方式介绍了无人机在无线通信、地面目标和区域的监视和监测的应用,以及货物交付方面的最新进展。本专著的主要目标读者包括研究生和研究生,以及在机器人、航空航天工程、无线通信、信号处理、系统理论、计算机科学和应用数学等多个领域工作的专业研究人员和行业从业者,他们对日益增长的自主导航和无人机部署领域有兴趣。这本书基本上是自成体系的。假定读者熟悉基本的本科水平的数学技巧。给出的结果在很大程度上进行了讨论,并通过实例加以说明。我们希望读者发现这本专著有趣和有用,并对自主导航和部署无人机通信、监视和交付领域的挑战性问题获得更深入的见解。此外,在书中,我们对一些开放的问题做了评论,我们鼓励读者进一步探索。这本书中的材料来自2018年至2022年期间两位作者之间的研究合作。它的一些部分单独出现在期刊和会议论文中。手稿将它们整合成一个统一的整体,突出它们之间的联系,补充作者新的原始发现,以系统和连贯的方式呈现整个材料。
本书以问题为导向,而不是以技术为导向。因此,每一章都是独立的,并致力于详细讨论一个有趣的问题,出现在快速发展的无人机应用领域。我们从控制系统的角度提出了相关的方法。因此,在第2-6章中,我们首先介绍了系统模型,然后阐述了感兴趣的问题,随后提出了解决这些问题的方法。最后,通过计算机仿真验证了所提方法的有效性。本书的结构如下。在第二章中,我们讨论了无人机作为空中基站提供蜂窝服务的应用。研究了无人机的主动部署问题。在此类应用中,无人机的部署对服务质量起着关键作用。研究了两种典型的场景。第一种场景是在城市地区,无人机被部署在街道上以避免与建筑物碰撞。第二种情况是针对灾区的。我们提出了几个优化问题来优化无人机提供的服务质量,并提出了计算高效的算法来解决这些问题。第三章讨论了利用无人机监测地面区域和目标的一些最新进展。具体来说,我们提出了找到配备面向地面摄像机的无人机的最小数量及其部署位置的方法,以全面监控一个感兴趣的区域,该区域可以是平坦的区域,也可以是有建筑物、山丘或山脉的不均匀区域。我们还提出了一种算法,可以找到无人机的最优位置,以调查一定区域内的一组地面目标。我们开发了用于无人机2D和3D部署的部署算法。并对这些方法的性能进行了理论分析。在第四章中,我们讨论了无人机在地面区域和目标的监视和监测方面的应用,这些应用对应于各种实际应用,包括但不限于海上石油泄漏、洪水和煤灰泄漏等灾害过程的监视,以及对地面车辆和行人的监控。
针对无人机编队协同执行监视任务,提出了几种分散导航算法。讨论了这些算法的最优性等性质。
第五章重点研究了利用无人机进行隐蔽视频监控,这是一个比较新的研究领域。与第3章和第4章中讨论的通常监视应用不同,隐蔽监视要求无人机的意图不被感兴趣的目标发现。我们提出两种方法来解决这个问题。第一种方法是基于优化的。提出了一种新的指标来表征伪装性能,该指标评估了无人机与目标之间相对距离和角度的变化。然后,在无人机自身运动约束和目标保持在视线范围内的条件下,提出了无人机伪装性能最大化和能量效率最小化的优化问题。提出了一种动态规划的方法来在线规划无人机的飞行轨迹。第二种方法是一种基于生物的运动伪装方法。为实现情感伪装,无人机始终在目标与固定参考点之间的直线段上运动。提出了一种仅以轴承信息为输入的滑模控制策略。我们提出了大量的计算机模拟来演示这些方法的性能。
在第六章中,我们讨论了无人机在最后一英里快递中的应用。无人机由于降低成本和增加机动性,被许多企业认为是未来物流行业的有前途的工具。然而,由于机载电池的限制,飞行时间有限是一个障碍。本章介绍了利用公共交通工具辅助无人机配送的最新研究成果。重点研究了无人机与公共交通工具协同飞行时的路径规划问题,提出了几种算法来解决不同情况下的路径规划问题。

