本研究调查了使用雷达跟踪数据将无人机(UAs)分类为旋翼或固定翼类,作为减少误报和操作员负担的一种手段。该研究使用来自实验飞行的UA遥测数据以及模拟雷达轨迹数据来训练机器学习(ML)分类器。探讨了迁移学习的应用。使用有限的数据集获得的结果显示,根据所使用的配置,真阳性和真阴性率超过80%。初步研究强调了改善这一性能的一些重要途径。
对国防和安全的重要性
探测和识别无人机对加拿大武装部队保护部队和资产至关重要。作为一种全天候和远程能力,雷达提供关键的轨迹数据,可以提示光电/红外(EO/IR)系统或操作员。本研究开发了一种基于雷达航迹数据的分类器,用于区分旋翼和固定翼两类无人机,以减少误报和操作人员负担。
本文内容概述
在本节中,我们将概述当前研究的数据流。基本概念是利用飞行中保存在无人机上的遥测数据。这些数据集代表了典型的UA轨迹,无论是在飞行员控制下还是使用预先编程的航路点,以及在真实的风环境条件下飞行等。这些遥测数据集可以告知轨迹本身,并可以作为训练分类器区分uav和杂波(特别是鸟类)或不同UA类型之间的基础。在本研究中,我们研究训练分类器来区分I类的旋转翼和固定翼无人机。
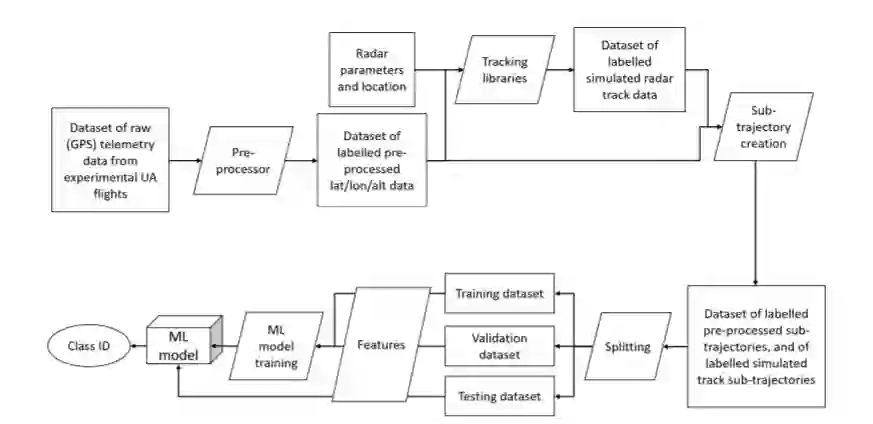
图1中的原理图解释了数据流。首先,对遥测数据集进行预处理,并将其标记为属于旋翼类(ID = 0)或固定翼类(ID = 1)。预处理的轨迹可以并将直接与涉及ML模型的其余数据流一起使用。经过预处理的轨迹数据还可以作为Stone Soup跟踪库的输入,与建模的雷达参数和位置一起,生成模拟雷达轨迹数据。这个过程将在第4节中介绍。
轨迹(来自预处理器和模拟轨迹数据)用于创建更多数量的子轨迹。这里的想法是获得一个分类器,它可以在只处理子轨迹后区分UA类。可以研究创建子轨迹的不同方法,这将在第5节中讨论。对于本研究,我们选择将子轨迹视为独立的实体,但其他选项都是有效的研究思路,如第7节所述。
其余的数据流涉及典型的监督机器学习技术,将数据集分为训练、验证和测试数据集、计算特征以及训练和测试ML模型。在我们的例子中,我们有预处理的遥测数据和模拟雷达轨迹数据的混合。
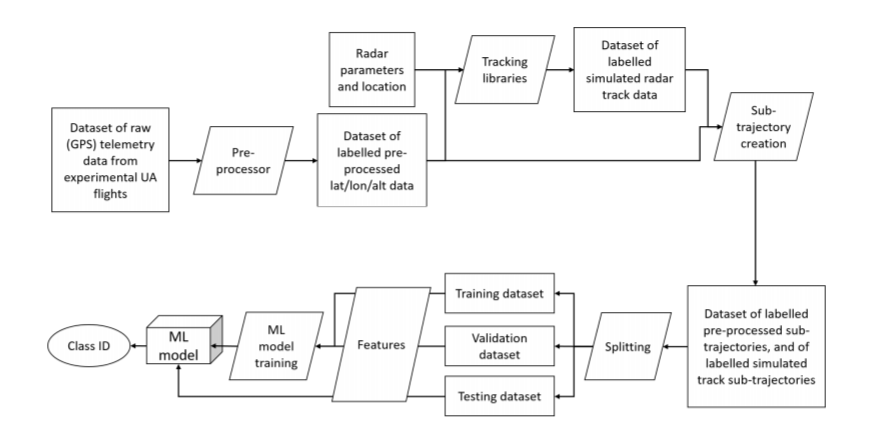
图1:当前研究中涉及的不同步骤的示意图。