在购置海军平台的资本有限的限制下,需要应对海上挑战。像波浪滑翔机这样的无人平台可能有助于解决这个问题。波浪滑翔机是一种无人水下航行器,它可以配备一个被动阵列,并可以在感兴趣的区域(AOI)保持长时间的部署。它们能够提供分层防御,防止对手在不被发现的情况下穿越该区域,从而提供低成本、持久性的反潜战(ASW)解决方案。在2016年由英国皇家海军领导的 "无人勇士 "演习中,展示了反潜波浪滑翔机成功追踪一艘载人潜艇的能力。然而,如何部署一定数量的波浪滑翔机来探测一艘过境的对手潜艇的问题仍然相对没有被探索。本论文旨在开发一个模型,以确定部署的波浪滑翔机的探测能力,该模型考虑了与探测水下接触有关的变量,在具有声学挑战性的水下环境中使用被动声纳,并在部署无人资产方面受到限制。该模型规定了实现特定探测概率所需的波浪滑翔机的最佳数量,并为其在AOI中的位置提供了参考,以尽量减少对手潜艇穿越该区域而不被发现的概率。
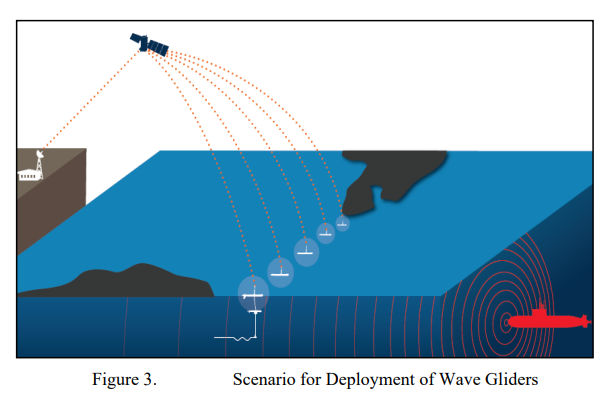
为了利用无人系统提供的无数优势,近年来,它们在军事行动中的地位越来越突出。无人系统,在这里是指无人水下航行器(UUV),被用于各种任务,如海洋学、反地雷、情报、监视和侦察(ISR),仅举几例。最近,UUV在反潜战(ASW)领域的使用也有所发展。本论文探讨了在反潜战中使用 "波浪滑翔机"--一种配备了被动阵列的UUV。该方案围绕着反潜波浪滑翔机在AUO中的最佳位置发展,以最大限度地提高探测到穿越该地区的敌方潜艇的概率。开发了一个模型来计算具有特定估计声纳范围(ESR)的特定数量的波浪滑翔机所累积的探测概率。
为了开发这个模型,使用被动声纳方程阐明了装有被动声纳的波浪滑翔机的水下探测特性。诸如设备、目标和环境特征等方面的因素被考虑到方程中。还考虑了影响声音在水下传播的各种因素,如传输损耗和水下噪声的存在,它阻碍了从目标接收的整体声音。被动声纳方程和其中涉及的参数被用来计算声纳的性能,称为优点数字(FOM)和信号过剩(SE),它告诉我们目标发出的信号是否会被波浪滑翔机上的传感器检测到(Urick,1967)。此后,Poisson扫描模型(Washburn,2014年),它将探测模拟成一个Poisson过程,被用来制定探测的累积概率的表达。该表达式为横向范围函数铺平了道路,该函数描述了在给定的环境条件下,波浪滑翔机在特定范围内探测目标的能力。
为了最大限度地提高总体探测概率,探索了将波浪滑翔机置于不同的编队中--即AOO中的障碍物、扇形、圆形和多障碍物。实验是通过模拟潜艇穿越该地区周边的随机点来进行的。然后改变不同编队中的ESR和波浪滑翔机的数量,以深入了解特定情况下的最佳位置。通过改变关键参数,如目标速度、泊松过程的检测率和模拟中的FOM,也进行了敏感性分析,以分析它们对总体检测概率的影响。模拟结果表明,将波浪滑翔机放置在AOO的障碍物阵中,可以最大限度地探测到穿越该区域的海底接触物的概率。尽管屏障编队总是比多屏障编队提供更高的探测概率,但它可以作为一种战术选择,使潜艇在较长的时间内处于防御状态,因为潜艇必须穿越穿插在一起的波浪滑翔机层。探测的概率随着ESR探测率的增加而增加,而保持所有其他因素不变,则随着目标速度的增加而减少。