
这项工作利用开源工具创建了一个虚拟环境和车辆,与现实世界的条件相比较,以测试、训练和评估不同的机器学习方法。特别是,在自监督的学习策略下,卷积和长短时记忆递归神经网络的结合,避免了大量的标签,并能学习新的模式和地形,特别是影响或限制移动性的模式。在自监督的结构中,LSTM产生连续的结果,提供给CNN。由于摄像机是正面观察,而LSTM只有在实际到达表面时才进行分类,因此该策略需要一种网络配置,使两种类型的数据兼容,以创建一个共同的地图。重新训练的CNN层通过“冻结”特征提取器被传递到在线工作。通过地图运行每个模型,并对结果进行归一化处理以使其具有可比性,显示出针对验证数据不同级别的准确性,这些验证数据分别使用两个网络上的弱标记和完全标记的数据,以及拟议的自监督结构中的组合。这表明单个网络对验证数据的准确率为85.93%,对弱标记数据的准确率为94.61%。由于允许网络使用代表同一类数据的不同来源,所以在组合方法上有更好的结果。
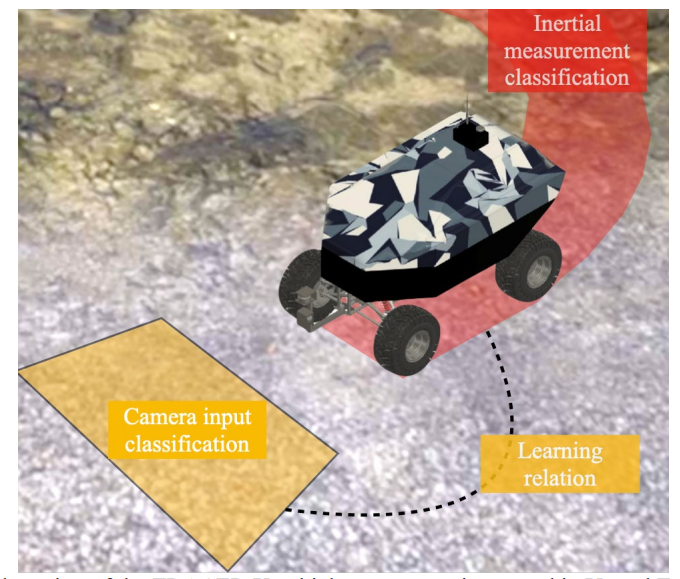
图1 TRACER X车辆在虚幻引擎4(UE4)中创建的地形上,并重新创建了视觉和物理属性。这使得车辆可以探索一个地图,呈现出固定化威胁有关的物理和视觉属性。在车辆探索的同时,它还创建了一个按低、中、高移动性划分的地图,使用ORBSlam在地图上定位表面的空间。
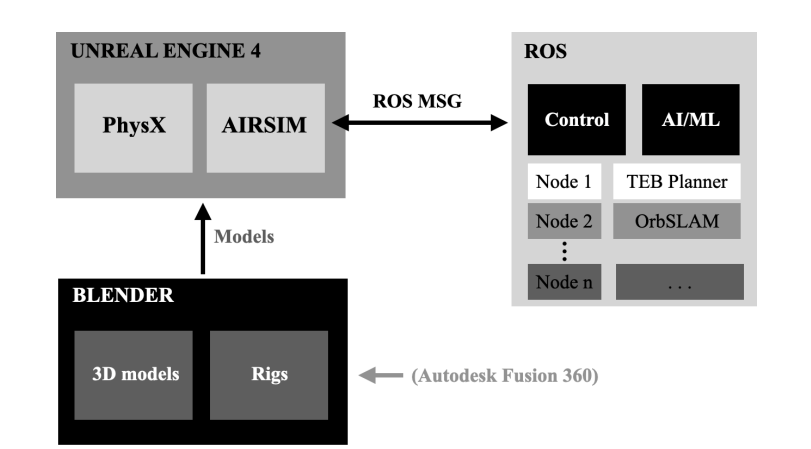
图2 仿真过程的软件结构考虑了创建模型、模拟物理、读取传感器以及结合控制和智能策略的要素
成为VIP会员查看完整内容
相关内容

Arxiv
13+阅读 · 2018年9月7日

相关VIP内容
相关资讯
相关论文
Arxiv
13+阅读 · 2018年9月7日