
本文重点介绍了适用于开放天空和城市作战的蜂群和成员的先进绝对和相对导航方法,并讨论了基于蜂群成员之间的认知(即基于感知和知识的适当和适应行动)和协作(即基于信息交流和空间分布的改进的推理和互动能力)原则的新型绝对和相对PVA估计方法的发展。本文概述了基本方法、一些仿真结果和平台硬件组件(三架多旋翼飞机和一个地面站)。它还进一步分析和讨论了使用在开放天空中收集的无人机系统飞行测试数据和城市环境模拟性能。
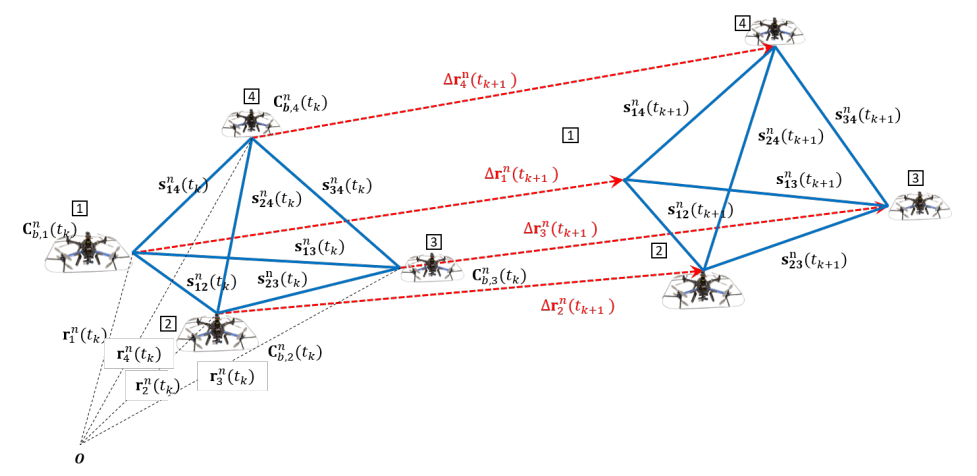
图1-1:四个sUAS蜂群几何形状随时间的变化
感知、理解、预测和决策
图3-1显示了所提出的蜂群认知和协作导航方法的基本框图。这个框图类似于Endsley[17]所介绍的动态决策系统中的态势感知模型。尽管Endsley的工作侧重于人为因素,但人的态势感的概念可以很容易地转化为蜂群成员和整个蜂群的态势感知模型。图3-1所示的决策循环也显示出与博伊德的观察、定向、决策和行动(OODA)循环以及感知-行动循环[18]有很多相似之处。
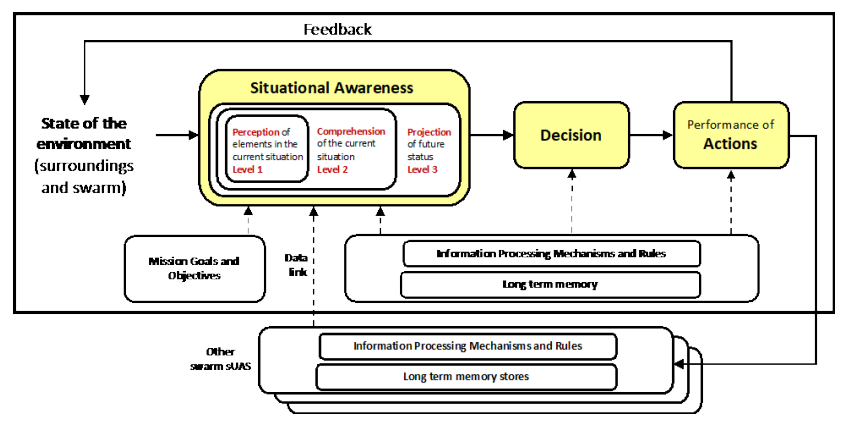
图3-1:认知和协作过程。
在决策回路中,蜂群及其成员正在提高对周围环境的认识,不仅是为了实现其任务目标和目的,也是为了满足所需的(严格的)绝对和相对导航性能要求。就像在人的因素中一样,存在三个层次的态势感知。在第一层,即感知,蜂群成员评估从机载导航传感器中获得了哪些相关信息并存储在机载长期存储器中(如地图等)。此外,蜂群成员还评估什么样的信息在蜂群中可能是可用的(记忆和传感器),如果其他成员还没有广播的话,可以请求提供。然后,评估结果被理解模块用来了解当前的态势,最后,预测未来的情况。就导航性能而言,这可以分别指当前的绝对和相对导航性能以及未来的导航性能。基于这些知识和任务目标,蜂群成员将就其计划的行动(例如,运动变化、新的轨迹、新的蜂群配置)做出决策。表3-1显示了蜂群成员上可能存在的一些与导航有关的传感器。请注意,蜂群不一定要由相同的SUAS组成。这可以降低平台的成本和重量。
