
近年来,各国军队加强了整合无人驾驶技术的努力,以提高有人-无人驾驶编队(MUM-T)的能力。由于一些国家的战斗年龄人口正在减少,军队正在转向容易获得的、具有成本效益的和复杂的无人驾驶技术。MUM-T拥有巨大的潜力,不仅可以缓解军队的人力短缺,还可以提高作战能力。这篇论文研究了MUM-T在前线的有效性,直至步兵小组支持城市地形的进攻行动。一个基于智能体的模拟被用来模拟有无无人驾驶地面车辆(UGV)支持一个步兵连的MUM-T作战行动。对超过76,800次的模拟战斗进行了分析。据观察,MUM-T概念可以极大地提高战斗力,通过增加敌人的伤亡来评估。还观察到UGV的重装时间、武器精度和自身的力量结构对步兵的杀伤力和生存能力有很大影响。这项分析的结论是,在小单位战术层面实施MUM-T对提高整体作战性能有很大潜力。未来,作战模型可以被整合到未来的军事演习中,这样就可以对模拟的结果进行验证和确认。
随着复杂技术和创新的使用,战争正在日益演变。在全球人力短缺的推动下,各国正在转向无人驾驶技术以缓解这种短缺并提供作战能力。因此,通过采用载人-无人小组(MUM-T),利用无人技术来支持前线步兵的潜力很大。
本论文旨在探索MUM-T在进攻性城市场景中的有效性。论文讨论、分析和研究了在城市环境中连级无人驾驶地面车辆(UGV)的战术运用效果。指导这项研究的研究问题包括以下几个方面:
主要问题:
1.有UGV或UGV支持的步兵小队的致命性和生存能力如何?
2.在模拟场景中,MUM-T部队的不同部队结构的战斗结果和分析是什么?
次要问题:
- 未来对MUM-T在更广泛的战略层面的潜在实施方法的研究范围是什么?
本论文使用基于智能体的模拟环境 "地图感知非统一自动机"(MANA),通过建立一个模拟并对UGV的作战方案进行分析,再加上影响城市地形中进攻性步兵部队作战效率的因素,来研究MUM-T。
该作战模型包括两组主要的作战部队,以美国陆军的步兵作战顺序(ORBAT)为模型: (1)由装备有UGV的友军步兵连组成的蓝方部队;(2)由作为防御方的对手步兵排组成的红方部队。图1显示了模拟作战行动的一个迭代的开始状态。
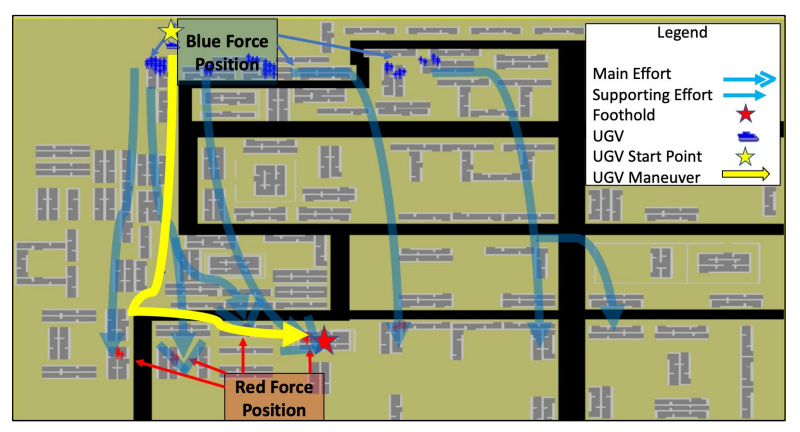
图1. MANA的一个模拟复制的初始状态的截图。
共创建了三个不同的实验设计(DOE),以研究MUM-T能力和概念的关键战斗特征和效果。衡量性能的重点是任务的有效性,重点是确定与杀伤力和生存能力相关的因素。作者对每个DOE采取了迭代的方法,将前一个DOE的一些发现和分析纳入下一个DOE。第一个DOE着重于与基线步兵ORBAT相比,最初引入MUM-T的效果。第二个DOE重点关注不同的人力和部队结构,以研究支持MUM-T的部队规模的影响。最后一个DOE结合了前两个DOE的各个方面,并创建了一个近乎正交和平衡的混合设计,以实现一个更全面和结论性的实验来结束这篇论文。近80,000次模拟战役,每次涵盖超过8小时的战斗,被运行和分析。
