
本文探讨了利用飞艇作为空中载体支持和部署无人机系统(UAS)的优势。无论是作为独立平台还是与传统飞机配合使用,飞艇无人机系统运载工具都能为军事和民用任务提供许多令人信服的优势。作为一个移动基地,它可以在可能导致地面或海洋无人机系统基地无法使用的政治影响下保持运作。它是一种几乎没有地理限制的力量投射工具,可产生心理影响,并有望成为一种节省成本的情报收集新方法。它还可用于民用变体,以支持:应急响应、安全/监视、医疗/食品供应品运送,以及向大都市和偏远社区运送商业包裹。本文介绍了飞艇-航空器运行的背景,并探讨了一般飞艇载体的概念。此外,还讨论了可用于支持飞艇-航空器概念的当代技术目录,并提出了航空站开发计划的基本要素。
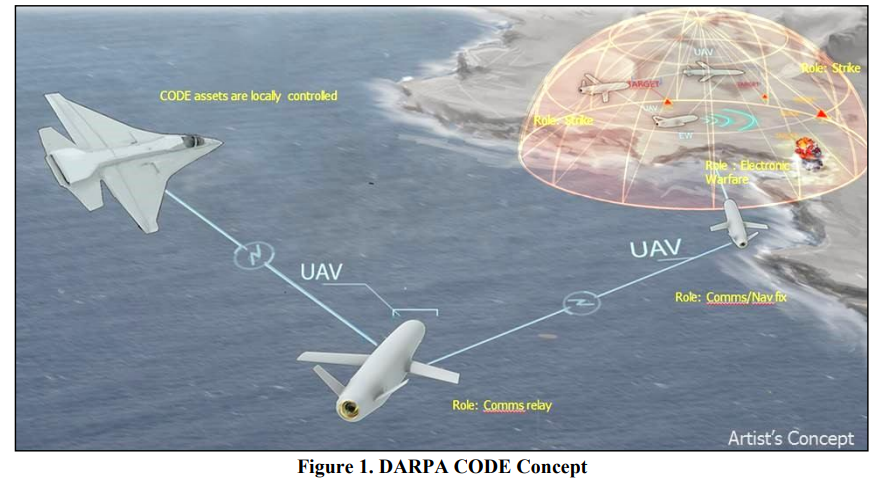
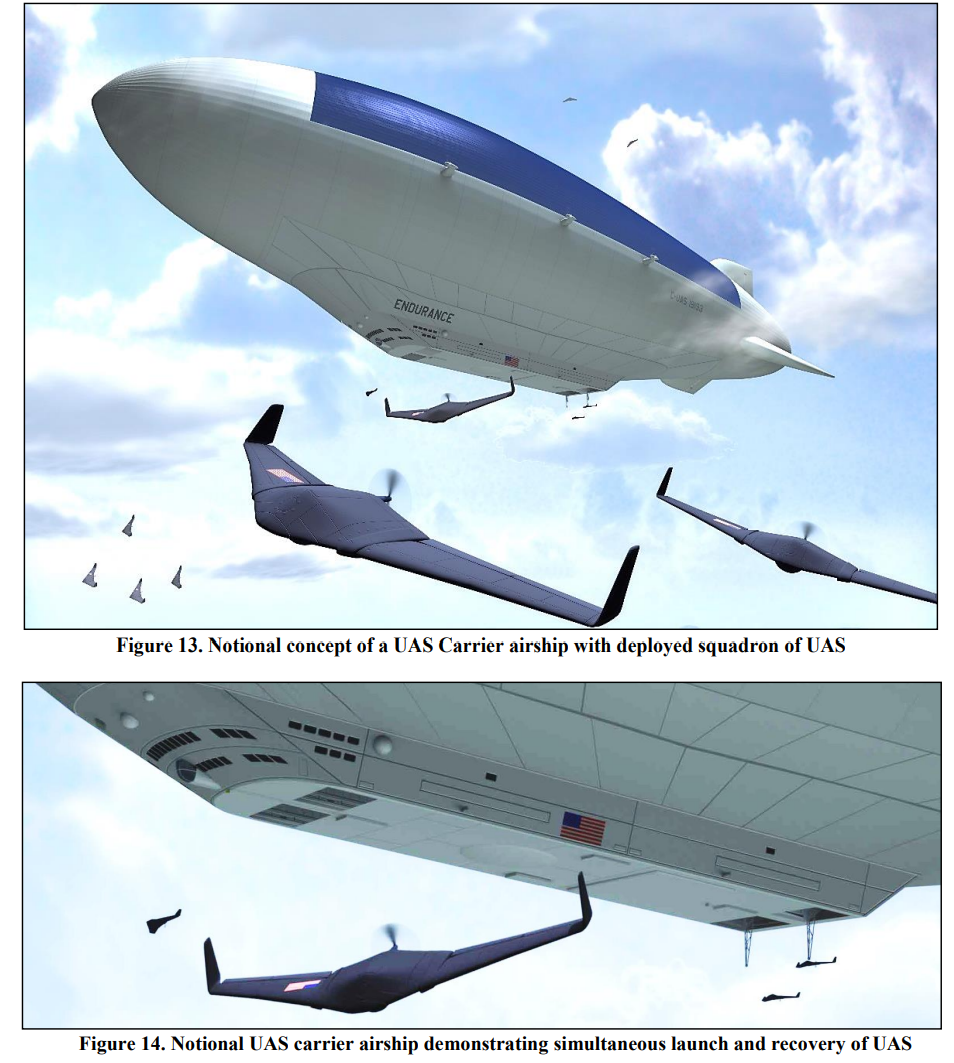
飞艇有三种基本类型:非刚性、半刚性和刚性。非刚性飞艇利用柔性包或 “包壳 ”内轻于空气(LTA)的气体压力来承受空气动力负荷并保持飞艇的形状。刚性飞艇将气室封装在一个刚性流线型框架内,外部结构部件连接在框架上。半刚性飞艇结合了这两种类型的元素。所有飞艇的主要运行原理都是通过置换大于飞艇整体重量的空气来实现的。正是飞艇内部 LTA 气体的静态升力使飞艇保持漂浮。飞艇可进一步分为两类:近浮力飞行器和半浮力飞行器(“混合动力”)。近浮力飞艇能够在浮力点或 “平衡点 ”的轻重偏差很小的范围内运行。混合动力飞艇通过向前飞行或使用类似直升机的旋翼,在空气动力学上产生额外的升力,从而始终比空气略重。飞艇的实际极限速度约为 87 千米/小时至 95 千米/小时,但目前正在开发的大多数概念飞艇的最高速度预计在 72 千米/小时至 78 千米/小时之间。飞艇的巡航速度通常在 40 kt 至 50 kt 左右,燃料消耗量是具有相同有效载荷能力的喷气式运输机的四分之一或更少。对于在平衡点附近运行的近浮力飞艇,最小空速可低至零。实际上,这意味着无人机系统的挂载速度应为 50 kt 或更低。与传统的比空气重的飞行器相比,这些飞艇的特点可使运载飞艇和要运载的无人机系统之间的可操作空速有更好的重叠(图 13 和 14)。
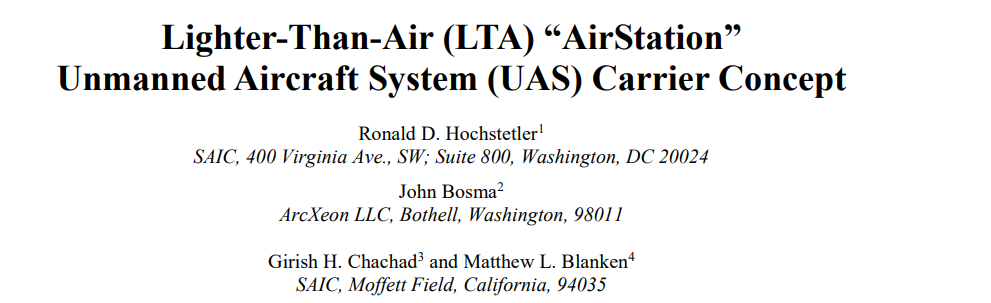
除了延长续航时间外,无人机系统载体的一个变革性特征是在操作员和无人机系统之间提供超视距(OTH)无人机系统控制和数据中继。超视距(OTH)信号中继的好处是可以扩大现有无人机系统的工作范围,特别是在地形或城市障碍物阻碍了视线(LOS)控制链路的情况下。这也可以通过装备无人机系统加油机来实现,在部署的无人机系统机队与远处的运载飞艇站之间提供 OTH 数据链路(图 15)。
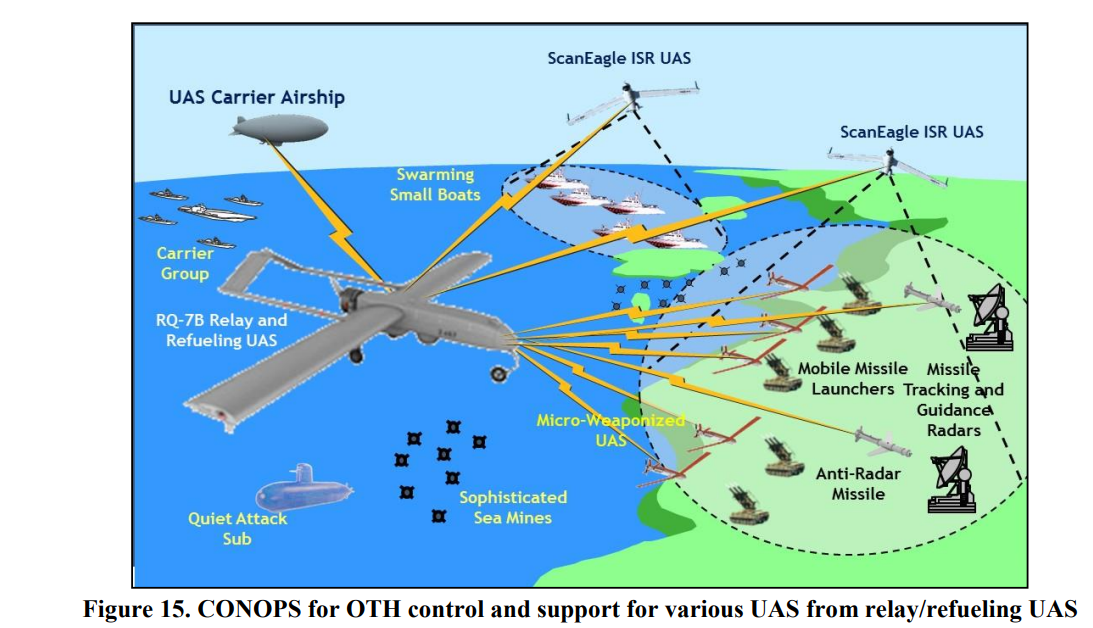
信号中继还可以使用较小(低功率)的无人机系统,这些系统可以更容易地与头顶上的加油/中继无人机系统保持数据链路,而不是直接与在一定距离外盘旋的飞艇保持数据链路。无人机系统载体还可以减少支持传统无人机系统任务所需的地面控制站(GCS)足迹。一个地面控制站可支持多艘以无人模式运行的无人机载体飞艇。无人机系统运载飞艇的数据链路能力、功率和航程可通过飞艇与美国大陆(CONUS)的卫星链路直接管理当地的无人机系统,从而进一步减少战区指挥与控制(C&C)的投入和成本。无人机系统维护支持可从全球控制中心转移到战区附近地区。无人机系统运载工具可留在后方地区,直到需要时才被派往数百英里之外的行动区。携带一定数量无人机系统的转场可在夜间或单兵携带防空系统高度以上进行。
无人机系统运载飞艇的首要价值是能够长时间进入一个区域,足以让无人机系统在需要的时间内进入空域执行任务。无人机系统运载飞艇可以驻扎在一个相对安全的位置,远离有争议或拥堵的空域,但仍然足够近,以便控制、加油或替换执行任务的无人机系统。与美国空军正在研究的 “武器库飞机 ”概念一样,“无人机航母 ”为在濒海水域执行任务的战地指挥部队和舰船,或在城市上空执行任务的商业包裹运送提供了一种更加 “有机 ”的无人机资源。无人机系统运载工具可在空域内随时待命,在需要时部署和支持无人机系统,以满足当地指挥官的即时需求。
在飞行中回收无人机系统的能力带来了许多操作机会。可以在无人机系统运载工具停泊在地面时,将无人机系统装载到运载工具上,然后再飞往可大规模或依次发射无人机系统的作战地点。这使得将无人机系统转运到作业地点变得更加容易,因为众多无人机系统都是通过部署它们的飞艇运输的,无需协调任何车辆转运航班或与传统货物运输相关的后勤工作。此外,多个无人机系统通过一个空域会带来信号带宽方面的挑战。无人机系统的飞行中回收还允许无人机系统从水下船只、水面船只、地面位置或空中飞机发射,然后由无人机系统承运商回收,返回进行翻新、维护和再利用。这样就可以使用更复杂、更昂贵的无人机系统,而不必总是消耗。这样,无人机系统潜在任务的可能性就大大增加了。

