

本文所介绍的研究得到了德国联邦国防军装备、信息技术和在役支持办公室 (BAAINBw) 的支持。
有人无人编队是提高民用和军事行动效率的一个关键方面。本文概述了一个为期四年的项目,该项目旨在开发和评估有人-无人编队飞行的方法。编队飞行场景是针对执行近距离编队飞行的有人和无人驾驶旋翼机量身定制的。本文介绍了使用案例和测试方法。开发了两种编队飞行算法,并对照基于航点的预编程基线进行了评估。评估是在由不同飞行员参与的模拟器活动和由一名评估飞行员参与的飞行测试活动中进行的。在最后的飞行测试活动中,首次实现了有人驾驶和无人驾驶直升机之间的耦合近距离编队飞行。最后,本文包含了飞行测试和模拟器测试的结果。
人机编队飞行
在德国航天中心 MUM-T 研究期间,对三种一般编队策略进行了调查。
第一种方法在评估过程中被用作基线。这种方法被称为航点模式,假定有人驾驶直升机的机组人员通过基于航点的界面指挥无人机的移动。这种基于航点的导航是无人直升机最先进的能力。由于耗时和可能的输入错误,飞行任务需要大量的准备时间。由于缺乏灵活性,无人直升机被认为是编队的领导者。因此,载人直升机跟随无人机的飞行模式并保持编队,同时监控空间间隔以避免碰撞。在这种模式下,载人直升机可以随时离开编队,但只要编队还在,就必须监控两架飞机之间的距离。通过引入最小距离或半径(称为安全半径)来确保飞行安全。图 1 给出了简要概述。
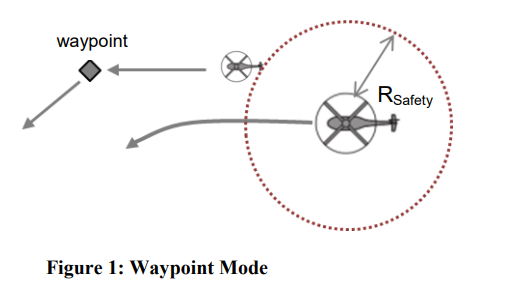
请注意,编队的领队是确定飞行速度或方向等飞行参数的飞机。在 DLR MUM-T 飞行测试活动中,出于安全考虑,无人机始终位于载人直升机之前。
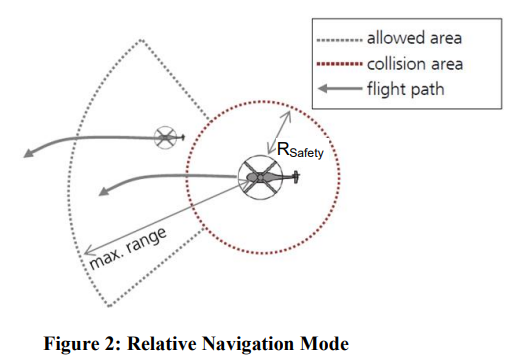
第二种基于相对导航的方法在下文中称为 RelNav。在这种模式下,无人机使用控制器保持与载人直升机的相对位置。有关编队飞行控制模式的详细介绍,请参阅参考文献[21]。[21]. 在该模式下,无人直升机与有人驾驶直升机直接耦合,无人机跟随有人驾驶直升机飞行,不执行任何规定任务。在 RelNav 模式下,有人驾驶直升机指挥编队,无人机保持相对位置。此外,还在有人驾驶直升机前方划定了一个安全区域,从驾驶舱可以目视到无人直升机,以提高飞行安全性。在图 2 中,该区域显示为允许区域,而最小距离则表示为安全半径。
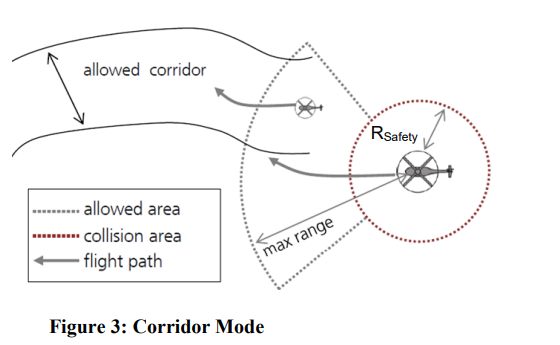
第三种方法旨在将 RelNav 模式中任务期间改变飞行路线的灵活性与航点模式中载人直升机不直接耦合运动相结合。这种模式被命名为 "走廊模式",因为它的主要特征是 "走廊"。走廊是一种类似航点的任务,具有规定的速度和转弯,但使用的不是规定的航点位置,而是允许的无障碍区域。在 "走廊 "模式下,无人飞行器会沿着走廊飞行,但如果违反了规定的边界,则会发出额外的速度指令。这些边界可以是最大或最小距离,也可以是相对于载人直升机的某个方向。在这种模式下,无人机能够对载人直升机的行为做出反应,但对细微的航向或速度变化不太敏感。无人机在走廊模式下的行为可分为两种不同情况。首先,在标称行为中,无人机完全处于走廊的边界内。因此,无人飞行器是按照规定的走廊飞行。边界上有预定义的缓冲区,为防止违反边界,会对无人飞行器发出速度指令。无人机在接近允许区域的边界或允许走廊的边界时会改变行为。在这两种情况下,如果同时到达两个边界,就会产生一个速度指令,以防止违反边界;详细计算可参见参考文献[21]。[21]。 如果违反了允许走廊的边界,无人飞行器应切换到 RelNav 模式。或者,如果走廊和载人直升机的允许区域都被侵犯,无人机应切换到航点模式。图 3 是走廊模式的示意图。
为确保飞行安全,该项目还开发了另一种应急模式,该模式被命名为 "脱离模式"。在任何 MUMT 编队飞行中,该子模式始终可用。如果违反了安全关键边界或出现技术缺陷,就会启用该模式。该模式将两架飞机分离,并触发无人机的预定义行为。载人直升机的脱离行为被定义为 90° 转身离开无人机并爬升约 150 英尺。
引入的 MUM-T 模式具有不同的自动化程度。不过,要实现安全的 MUM-T 编队飞行,必须执行几项共同任务。它们是:
领导编队:一架飞机(称为领队)确定编队参数(如速度、高度或航迹)。
避免碰撞:这项任务要求监控飞机之间的距离,并对任何违反安全规定的情况做出反应。
保持编队:监控编队领队位置并保持相对位置不变是保持编队的任务。
