
在过去十年中,无人机(UAV)因其可管理性和风险规避性而被广泛应用于许多商业领域。考虑的主要问题之一是多架无人飞行器的任务规划,必须找到满足问题不同约束条件的解决计划。此外,这个问题还有一些必须同时优化的变量,如时间跨度、任务成本或风险。因此,该问题有很多可能的最优解,操作员必须从中选择最终的执行方案。为了减少操作员在这一决策过程中的工作量,需要一个决策支持系统(DSS)。在这项工作中,设计了一个由排序和过滤功能组成的决策支持系统,可对最佳解决方案进行排序和缩减。在多无人飞行器任务规划场景中,对多种多标准决策(MCDM)方法(包括一些模糊 MCDM)进行了比较,以研究哪种方法更适合多无人飞行器决策支持系统。专家操作员对返回的解决方案进行了评估,以便对基于模糊的方法和传统方法进行评分和比较,结果表明模糊方法通常能获得更好的平均分。另一方面,对于过滤系统,设计了一个基于解决方案接近程度的相似度函数,并研究了用于过滤的阈值。
过去几年中,无人飞行器(UAVs)能力的快速发展导致了新的军事和商业应用的兴起,许多领域,如监视(Gu 等人,2018 年)、培训(Rodriguez-Fernandez 等人,2018 年)、消防(Ghamry 等人,2017 年)、农业(Tokekar 等人,2016 年)或灾害和危机管理(Nedjati 等人,2016 年)等都得到了研究。
无人飞行器的主要研究领域之一是任务规划,即无人飞行器群必须在考虑到空间和时间限制的情况下协同执行某些任务。这是无人机研究的一个重点目标,因为它是一个复杂的问题,加重了无人机操作员的工作量。如今,无人飞行器由地面控制站(GCS)的人类操作员远程控制,使用的是最基本的规划系统,如预先配置的计划、人工提供的时间表或经典规划系统。这些基于图搜索或逻辑引擎的经典规划系统通常受到严重的实际限制,其求解器的计算成本很高。
为了执行复杂的协调任务,规划系统需要更高效的问题解决能力,以应对空间和时间领域的目标冲突和严格限制。此外,这些问题通常旨在优化多个相互冲突的目标,包括燃料消耗、时间跨度、任务成本、使用的无人机数量以及可能危及任务的不同风险因素等。因此,所谓的多无人机合作任务规划问题(MCMPP)最近在研究界获得了强劲的发展势头,其推动力是在不久的将来,无人机的应用规模和数量将显著增加(Ramirez-Atencia 等人,2017b)。
如今,在大多数全球监控系统中,由于任务的高度复杂性,通常有多个操作员只负责一架无人机。该领域的主要目标之一就是降低这种复杂性,因此这种关系可以互换,在不久的将来,一名操作员就能控制多架飞行器。为此,主要要求之一是实现 MCMPP 的自动化并降低其复杂性。在以前的工作中,MCMPP 被表述为一个约束满足问题(CSP)(Ramirez-Atencia & Camacho,2018a)。在这项工作中,问题的变量是无人机对任务、GCS、传感器和其他变量的分配,并定义了若干空间和时间约束,以确保解决方案的一致性。然后,考虑到七个相互冲突的目标,使用多目标进化算法(MOEA)(Ramirez-Atencia et al. 在该算法中,推断出了帕累托最优前沿(POF)的估计值,从而得到了一个解决方案(任务计划)组合,尽管该组合在所考虑的冲突目标之间达到了最佳平衡。
这个问题的一个关键点,也是这项工作的动机,就是有时整个帕累托最优前沿(POF)包含大量的解决方案。在这种情况下,如何从中选择一个解决方案成为操作员的一项艰巨任务。在某些情况下,操作员可以提供有关其偏好的先验信息,这些信息可用于优化过程。但在大多数情况下,操作员无法提供这些信息,因此必须考虑后验方法。在这种情况下,后验多目标优化算法通常会返回大量的解决方案,决策过程变得非常复杂。
Ramirez-Atencia 等人,2018a)中就出现了这种情况,获得了大量非主导解。为了减少解的数量,在(Ramirez-Atencia 等人,2017a)中使用了膝点 MOEA 方法,根据优化变量(即 POF 的膝点)只返回最重要的解。虽然这种方法大大减少了解决方案的数量(从数百个减少到数十个),但在大多数情况下仍会有多个解决方案,操作员必须最终决定哪一个最适合任务。这一决策过程并不容易,因为每个解决方案都包含多个变量分配和多个定义其质量的标准。
在这种情况下,决策支持系统(DSS)对于指导操作员选择最佳解决方案至关重要。该决策支持系统提供了一个排序系统,可对优化算法获得的解决方案进行排序,此外还提供了一个过滤系统,可减少所提供解决方案的数量。有几种多标准决策(MCDM)方法可用于根据操作员的偏好对解决方案进行排序和选择,这些偏好被用作不同标准的重要性百分比或排序。不过,有时这些偏好可能是模糊的,因此必须以不同的方式加以考虑。针对这些情况,存在模糊版的多因素强迫管理方法,在这种方法中,这些偏好被视为模糊数。
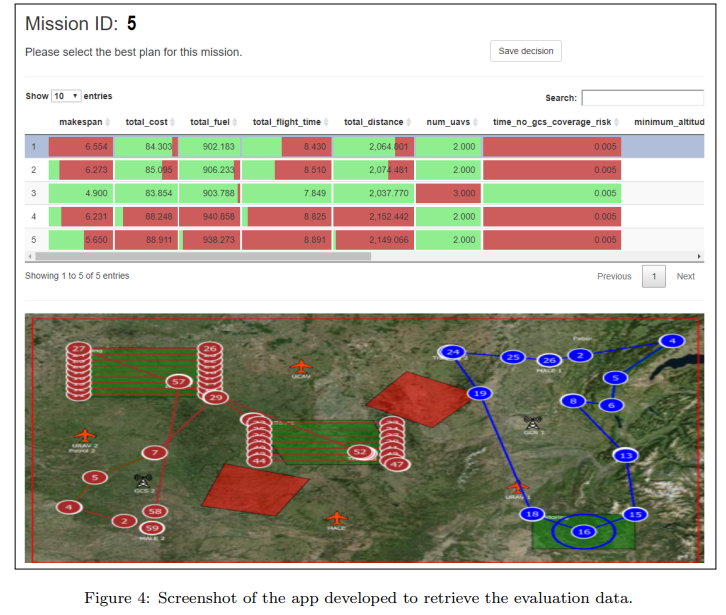
本文的目标是开发一种 DSS,以协助无人机操作员选择任务计划。在之前的一项工作(Ramirez-Atencia 等人,2018b)中,一些经典的 MCDM 方法被用于对 MOEA 返回的 MCMPP 解决方案进行排序(Ramirez-Atencia 等人,2017a)。本文考虑了新的 MCDM 方法及其模糊版本。由于操作员提供的偏好也是模糊的,因此这些方法有望提供更好的结果。为了测试这些方法,我们使用了一些现实的任务场景。专家操作员根据一些操作员配置文件(偏好)对每个任务提供的解决方案进行评估,并通过这种评估对 MCDM 算法进行评分。此外,为了提供一个完整的多标准 DSS,还设计并测试了一个过滤系统,该系统可省略类似的解决方案。
本文其余部分的结构如下。第 2 节介绍了 DSS 的一些背景,包括模糊 MCDM。第 3 节介绍无人飞行器任务规划问题以及为帮助操作员选择最佳解决方案而开发的 DSS,包括排序和过滤系统。第 4 节介绍了排序和过滤系统的实验结果。最后,最后一节得出结论,并概述了与这项工作相关的未来研究方向。
