
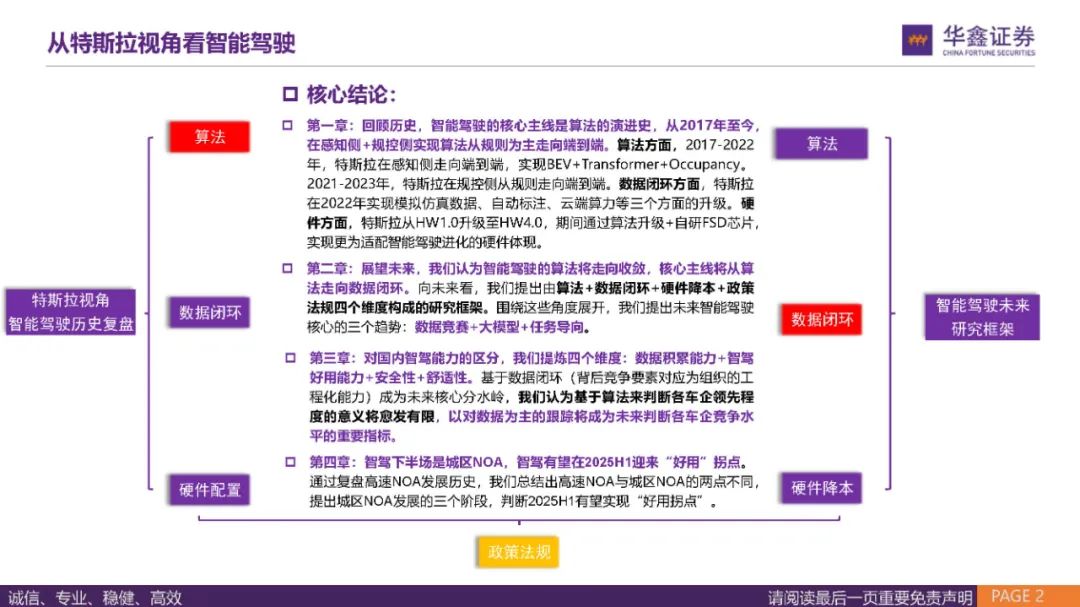
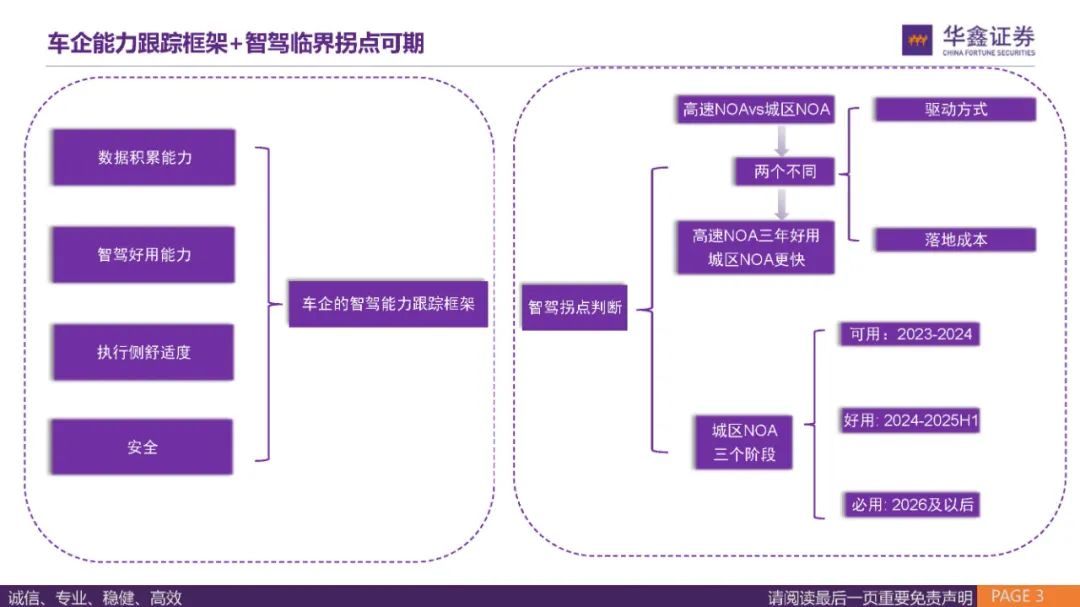
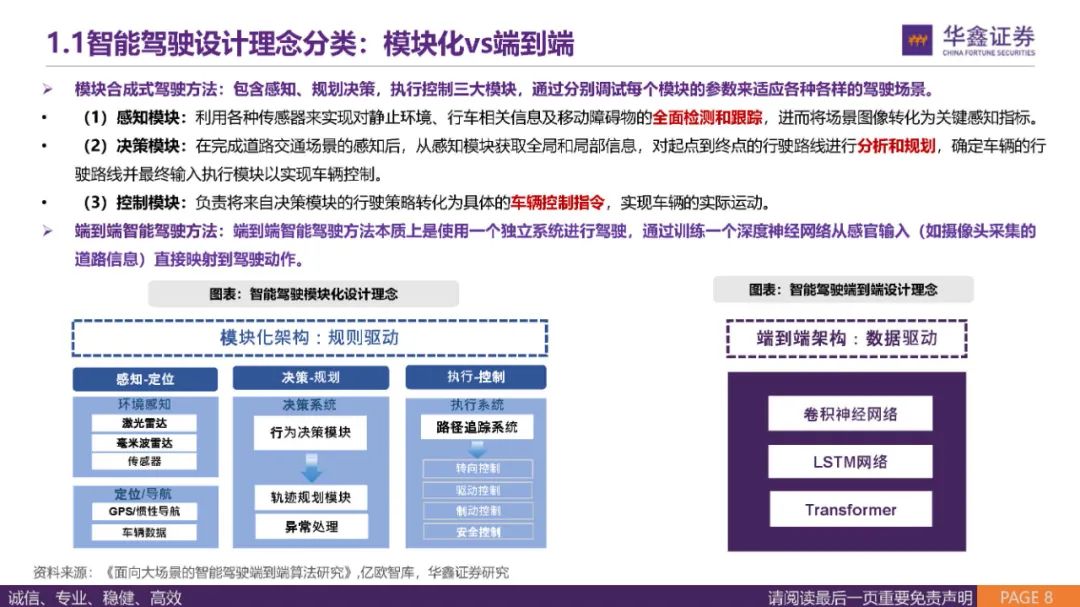
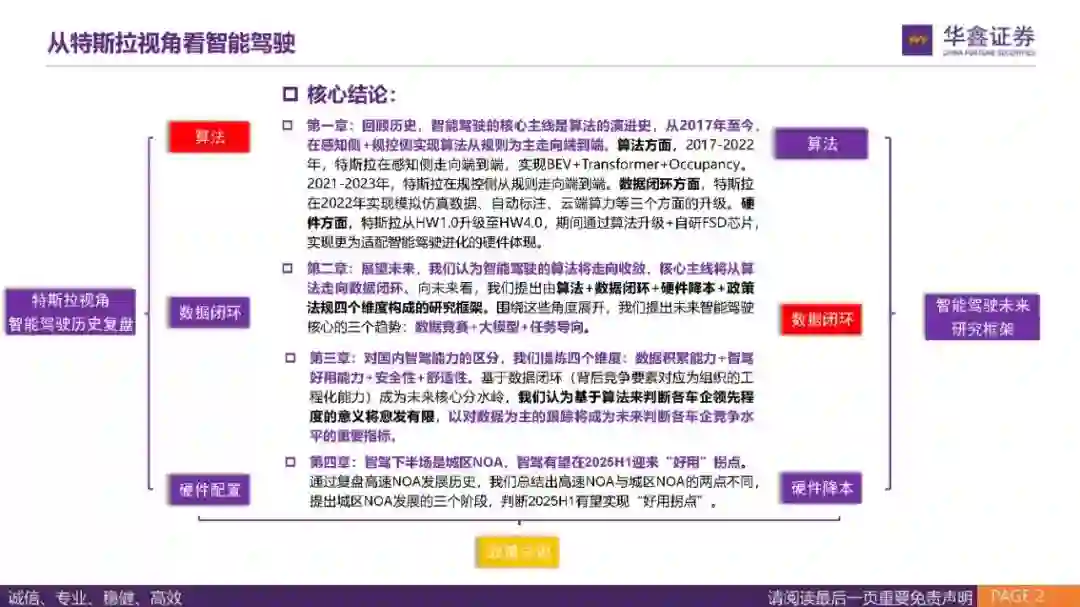
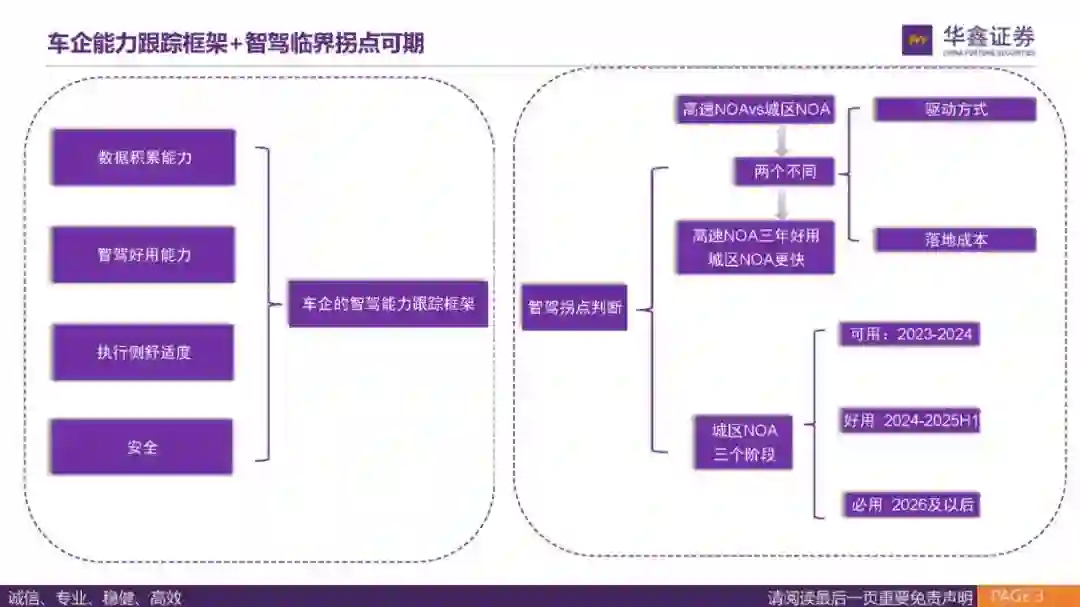
第一章:回顾历史**,智能驾驶的核心主线是算法的演进史,从2017年至今,在感知侧+规控侧实现算法从规则为主走向端到端**。算法方面,2017-2022年,特斯拉在感知侧走向端到端,实现BEV+Transformer+Occupancy。2021-2023年,特斯拉在规控侧从规则走向端到端。数据闭环方面,特斯拉在2022年实现模拟仿真数据、自动标注、云端算力等三个方面的升级。硬件方面,特斯拉从HW1.0升级至HW4.0,期间通过算法升级+自研FSD芯片,实现更为适配智能驾驶进化的硬件体现。 ** 第二章:展望未来,我们认为智能驾驶的算法将走向收敛,核心主线将从算法走向数据闭环**。向未来看,我们提出由算法+数据闭环+硬件降本+政策法规四个维度构成的研究框架。围绕这些角度展开,我们提出未来智能驾驶核心的三个趋势:数据竞赛+大模型+任务导向。 第三章:对国内智驾能力的区分,我们提炼四个维度:数据积累能力+智驾好用能力+安全性+舒适性。基于数据闭环(背后竞争要素对应为组织的工程化能力)成为未来核心分水岭,我们认为基于算法来判断各车企领先程度的意义将愈发有限,以对数据为主的跟踪将成为未来判断各车企竞争水平的重要指标。 第四章:智驾下半场是城区NOA,智驾有望在2025H1迎来“好用”拐点。


成为VIP会员查看完整内容



相关内容
Arxiv
0+阅读 · 2024年7月15日
Arxiv
153+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年7月15日
Arxiv
153+阅读 · 2023年3月29日