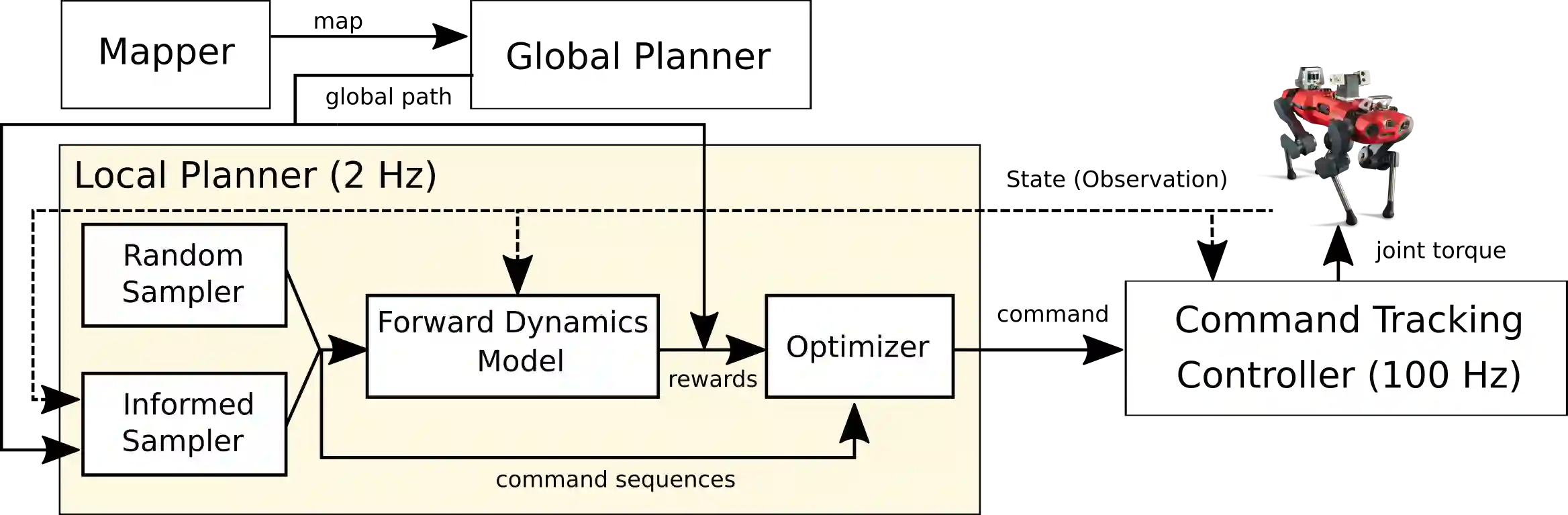
For autonomous quadruped robot navigation in various complex environments, a typical SOTA system is composed of four main modules -- mapper, global planner, local planner, and command-tracking controller -- in a hierarchical manner. In this paper, we build a robust and safe local planner which is designed to generate a velocity plan to track a coarsely planned path from the global planner. Previous works used waypoint-based methods (e.g. Proportional-Differential control and pure pursuit) which simplify the path tracking problem to local point-goal navigation. However, they suffer from frequent collisions in geometrically complex and narrow environments because of two reasons; the global planner uses a coarse and inaccurate model and the local planner is unable to track the global plan sufficiently well. Currently, deep learning methods are an appealing alternative because they can learn safety and path feasibility from experience more accurately. However, existing deep learning methods are not capable of planning for a long horizon. In this work, we propose a learning-based fully autonomous navigation framework composed of three innovative elements: a learned forward dynamics model (FDM), an online sampling-based model-predictive controller, and an informed trajectory sampler (ITS). Using our framework, a quadruped robot can autonomously navigate in various complex environments without a collision and generate a smoother command plan compared to the baseline method. Furthermore, our method can reactively handle unexpected obstacles on the planned path and avoid them. Project page https://awesomericky.github.io/projects/FDM_ITS_navigation/.
翻译:对于在不同复杂环境中自主四重机器人导航而言,典型的SOTA系统以等级方式由四个主要模块组成 -- -- 地图仪、全球规划员、当地规划员和指挥跟踪控制员 -- -- 四个主要模块组成。在本文中,我们建立一个强大和安全的地方规划员,目的是生成一个高速计划,从全球规划员那里追踪粗略规划的道路。以前的工作使用过基于路径的方法(如比例-差异控制和纯粹追寻),这些方法简化了跟踪问题到当地点目标导航的路径。然而,由于两个原因,它们在几何复杂和狭窄的环境中经常发生碰撞;全球规划员使用粗糙和不准确的模式,当地规划员无法很好地跟踪全球计划。目前,深层次的学习方法是一个吸引人的替代方法,因为它们能够从全球规划者那里更准确地学习安全和路径的可行性。但是,现有的基于路径的深层次学习方法无法进行长远的规划。在这项工作中,我们提议了一个基于学习的完全自主的导航框架,由三个创新要素组成:一个学习的远方动态模型(DM),一个基于在线取样的、不准确和不准确的模型/移动的模型/轨道。在不使用我们的轨道上,一个基于模型的轨道上,可以生成的模型/轨道。