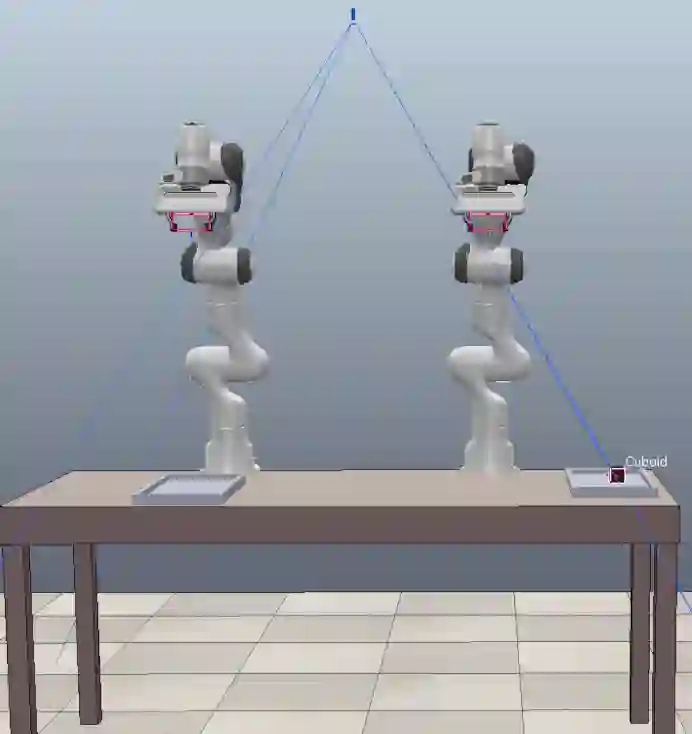
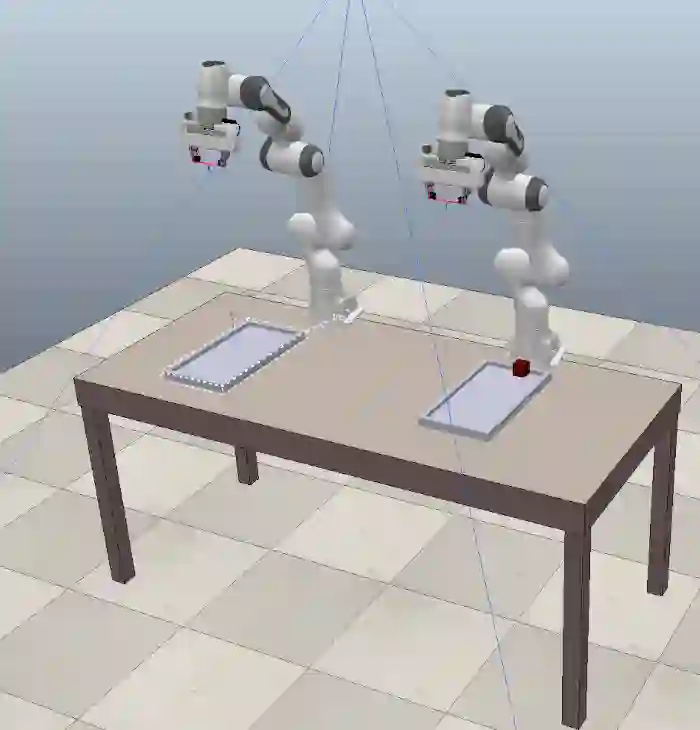
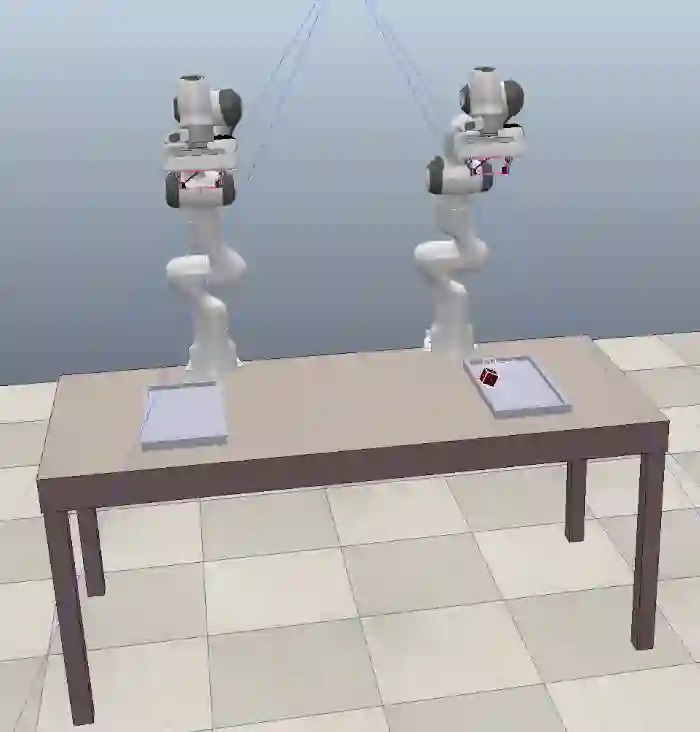
Robotic control tasks are often first run in simulation for the purposes of verification, debugging and data augmentation. Many methods exist to specify what task a robot must complete, but few exist to specify what range of environments a user expects such tasks to be achieved in. ProbRobScene is a probabilistic specification language for describing robotic manipulation environments. Using the language, a user need only specify the relational constraints that must hold between objects in a scene. ProbRobScene will then automatically generate scenes which conform to this specification. By combining aspects of probabilistic programming languages and convex geometry, we provide a method for sampling this space of possible environments efficiently. We demonstrate the usefulness of our language by using it to debug a robotic controller in a tabletop robot manipulation environment.
翻译:机器人控制任务通常首先为核查、调试和数据增强目的在模拟中运行。 有许多方法可以指定机器人必须完成什么任务, 但很少有方法可以指定用户期望完成这些任务的环境范围 。 ProbRobSceene 是描述机器人操作环境的概率性规格语言 。 使用这种语言, 用户只需具体说明在现场对象之间必须持有的关系限制 。 ProbRobScene 将自动生成符合此规格的场景 。 通过将概率化的编程语言和二次曲线几何学结合起来, 我们提供了一种方法来对可能的环境进行取样 。 我们用这种语言在桌面机器人操作环境中调试机器人控制器, 展示了我们语言的实用性 。