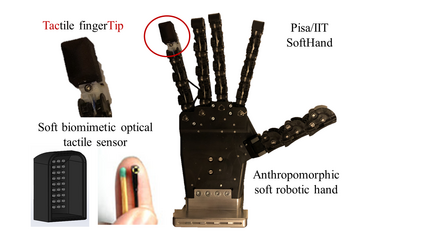
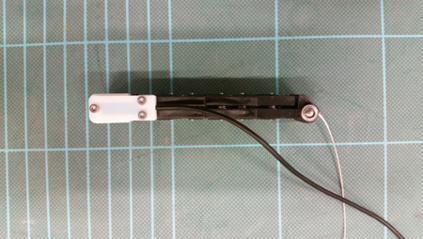
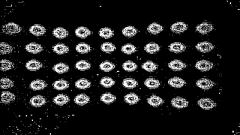
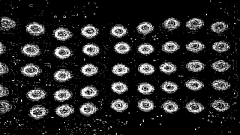
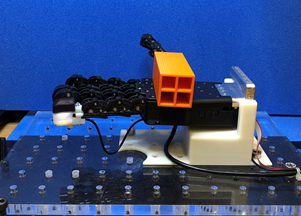
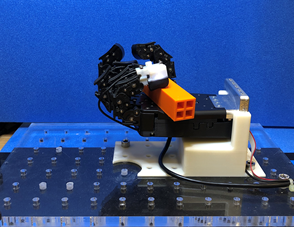
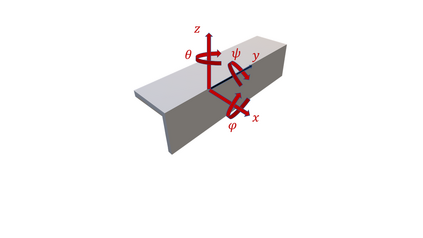
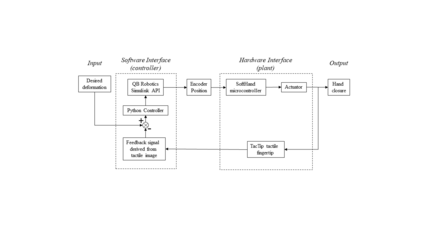
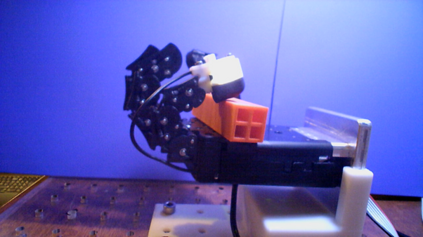
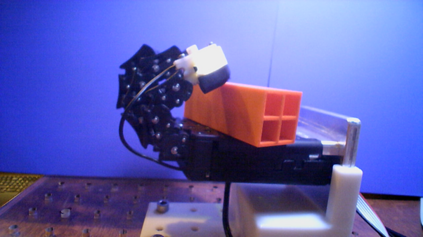
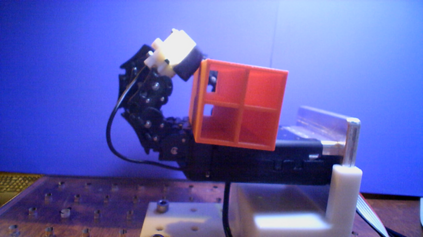
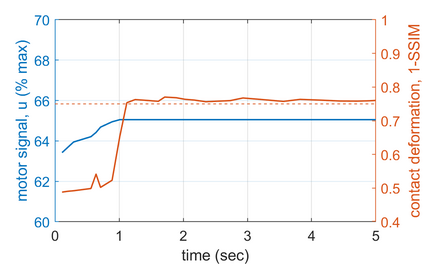
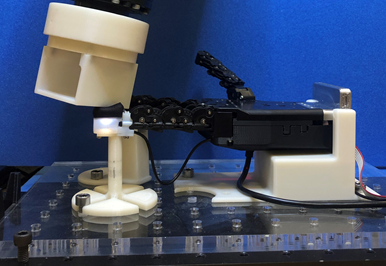
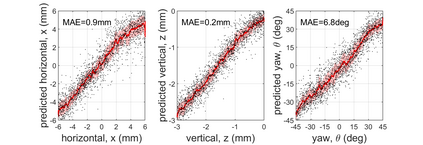
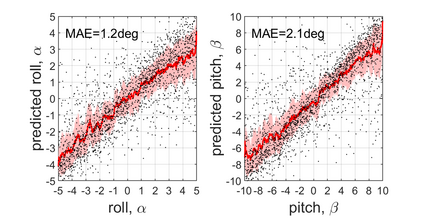
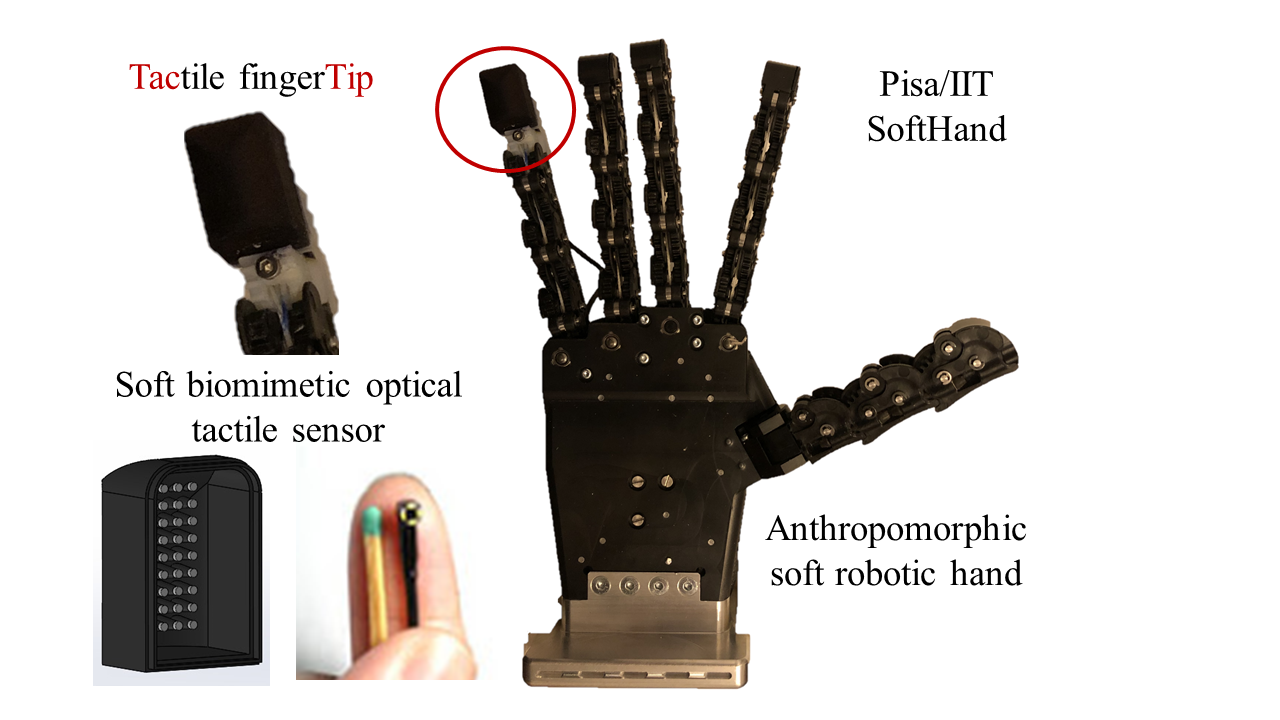
In this work, we report on the integrated sensorimotor control of the Pisa/IIT SoftHand, an anthropomorphic soft robot hand designed around the principle of adaptive synergies, with the BRL tactile fingertip (TacTip), a soft biomimetic optical tactile sensor based on the human sense of touch. Our focus is how a sense of touch can be used to control an anthropomorphic hand with one degree of actuation, based on an integration that respects the hand's mechanical functionality. We consider: (i) closed-loop tactile control to establish a light contact on an unknown held object, based on the structural similarity with an undeformed tactile image; and (ii) controlling the estimated pose of an edge feature of a held object, using a convolutional neural network approach developed for controlling other sensors in the TacTip family. Overall, this gives a foundation to endow soft robotic hands with human-like touch, with implications for autonomous grasping, manipulation, human-robot interaction and prosthetics. Supplemental video: https://youtu.be/ndsxj659bkQ
翻译:在这项工作中,我们报告对Pisa/IIT SoftHand(一种围绕适应性协同增效原则设计的人类形态软机器人手)的综合感官控制,即BRL触摸指点(TacTip),一种基于人类触感的软生物模拟光学光学触摸传感器。我们的重点是如何利用触觉感感来控制一个具有某种感知力的人体形态手,其作用力以尊重手的机械功能的整合为基础。我们考虑:(一) 闭路触控,以便在一个未知的被搁置物体上建立光接触,其依据是未变形触动图像的结构相似性;(二) 利用为控制TacTip家族的其他传感器而开发的演动神经网络方法,控制一个被搁置物体的边缘特征的估计面部。总体而言,这为将软机器人手与人似触碰的内嵌入、操纵、人类机器人相互作用和假肢的影响打下奠定了基础。 补充视频: https://youtu/robends。