
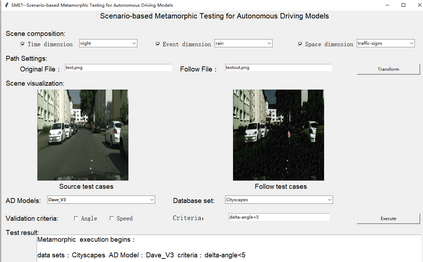
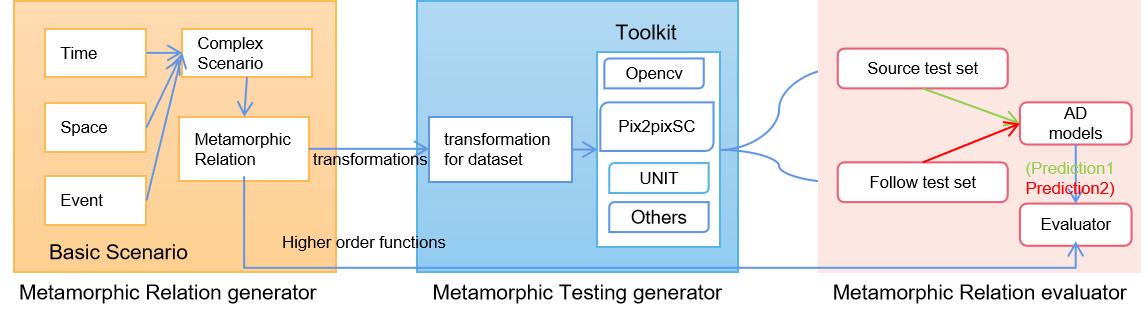
To improve the security and robustness of autonomous driving models, this paper presents SMET, a scenariobased metamorphic testing tool for autonomous driving models. The metamorphic relationship is divided into three dimensions (time, space, and event) and demonstrates its effectiveness through case studies in two types of autonomous driving models with different outputs.Experimental results show that this tool canwelldetectpotentialdefectsoftheautonomousdrivingmodel, and complex scenes are more effective than simple scenes.
翻译:为提高自主驾驶模式的安全和稳健性,本文介绍了基于情景的自主驾驶模式变形测试工具SMET, 其变形关系分为三个层面( 时间、 空间和事件), 并通过对两种具有不同产出的自主驾驶模式进行案例研究来展示其有效性。 实验结果表明,这一工具可以探测到自主驾驶模式的潜在缺陷,复杂的场景比简单的场景更有效。

相关内容

ACM/IEEE第23届模型驱动工程语言和系统国际会议,是模型驱动软件和系统工程的首要会议系列,由ACM-SIGSOFT和IEEE-TCSE支持组织。自1998年以来,模型涵盖了建模的各个方面,从语言和方法到工具和应用程序。模特的参加者来自不同的背景,包括研究人员、学者、工程师和工业专业人士。MODELS 2019是一个论坛,参与者可以围绕建模和模型驱动的软件和系统交流前沿研究成果和创新实践经验。今年的版本将为建模社区提供进一步推进建模基础的机会,并在网络物理系统、嵌入式系统、社会技术系统、云计算、大数据、机器学习、安全、开源等新兴领域提出建模的创新应用以及可持续性。
官网链接:http://www.modelsconference.org/
专知会员服务
32+阅读 · 2019年11月28日
Arxiv
0+阅读 · 2021年5月28日
Arxiv
0+阅读 · 2021年5月26日
Arxiv
3+阅读 · 2018年12月13日


相关VIP内容
专知会员服务
32+阅读 · 2019年11月28日
相关资讯