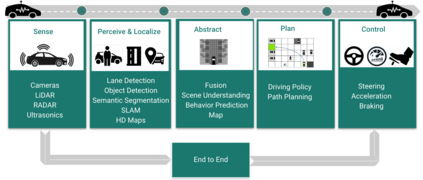
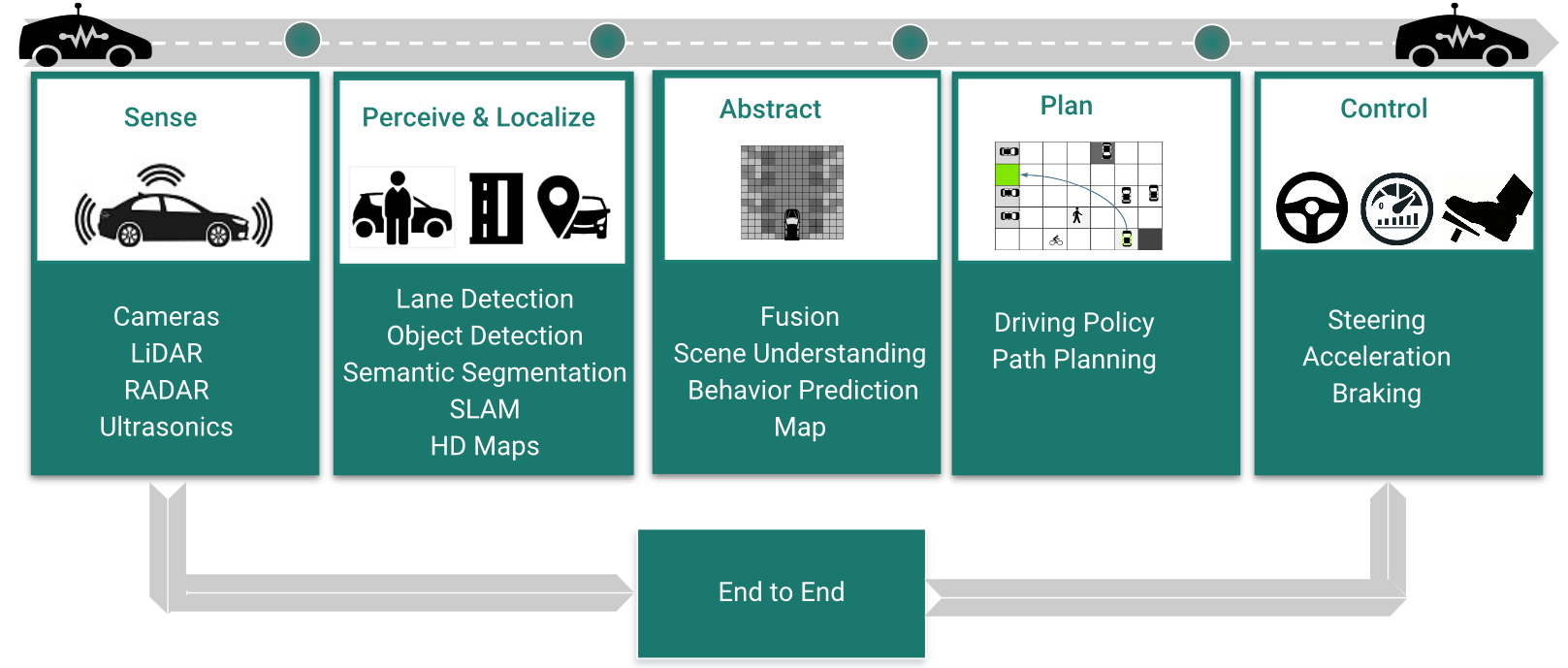
Deep Reinforcement Learning (DRL) has become increasingly powerful in recent years, with notable achievements such as Deepmind's AlphaGo. It has been successfully deployed in commercial vehicles like Mobileye's path planning system. However, a vast majority of work on DRL is focused on toy examples in controlled synthetic car simulator environments such as TORCS and CARLA. In general, DRL is still at its infancy in terms of usability in real-world applications. Our goal in this paper is to encourage real-world deployment of DRL in various autonomous driving (AD) applications. We first provide an overview of the tasks in autonomous driving systems, reinforcement learning algorithms and applications of DRL to AD systems. We then discuss the challenges which must be addressed to enable further progress towards real-world deployment.
翻译:近些年来,深入强化学习(DRL)越来越强大,取得了显著成就,如Deepmind's AlphaGo。它被成功地部署在诸如Mobiley的路径规划系统等商用车辆上。然而,关于DRL的绝大多数工作侧重于控制合成汽车模拟器环境中的玩具例子,如TORCS和CARLA。一般而言,DRL在实际应用中的可用性方面仍处于初级阶段。我们本文件的目标是鼓励在各种自主驾驶(AD)应用程序中实际部署DRL。我们首先概述了自主驾驶系统、强化学习算法和DRL对AD系统的应用等任务。然后我们讨论了必须应对的挑战,以便进一步推进现实世界的部署。