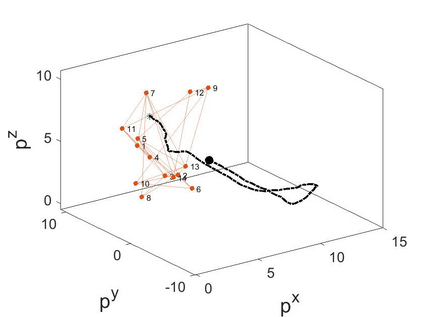
We propose a linear time-difference-of-arrival (TDOA) measurement model to improve \textit{distributed} estimation performance for localized target tracking. We design distributed filters over sparse (possibly large-scale) communication networks using consensus-based data-fusion techniques. The proposed distributed and localized tracking protocols considerably reduce the sensor network's required connectivity and communication rate. We, further, consider $\kappa$-redundant observability and fault-tolerant design in case of losing communication links or sensor nodes. We present the minimal conditions on the remaining sensor network (after link/node removal) such that the distributed observability is still preserved and, thus, the sensor network can track the (single) maneuvering target. The motivation is to reduce the communication load versus the processing load, as the computational units are, in general, less costly than the communication devices. We evaluate the tracking performance via simulations in MATLAB.
翻译:我们提出一个线性时间差异(TDOA)测量模型,以改善对局部目标跟踪的功能估计。我们使用基于共识的数据融合技术,设计分散(可能大规模)通信网络的过滤器;拟议的分布式和局部跟踪协议大大降低了传感器网络所需的连通和通信率。我们进一步考虑在失去通信链接或感应节点的情况下,以$kappa$为冗余的可观察性和容错设计。我们介绍了其余传感器网络(继链接/节点清除之后)的最低限度条件,这样分布式可观测性仍然得到保存,因此传感器网络可以跟踪(单独)操纵目标。这样做的目的是减少通信负荷与处理负荷,因为计算单位一般比通信装置费用低。我们通过MATLAB的模拟来评估跟踪性能。