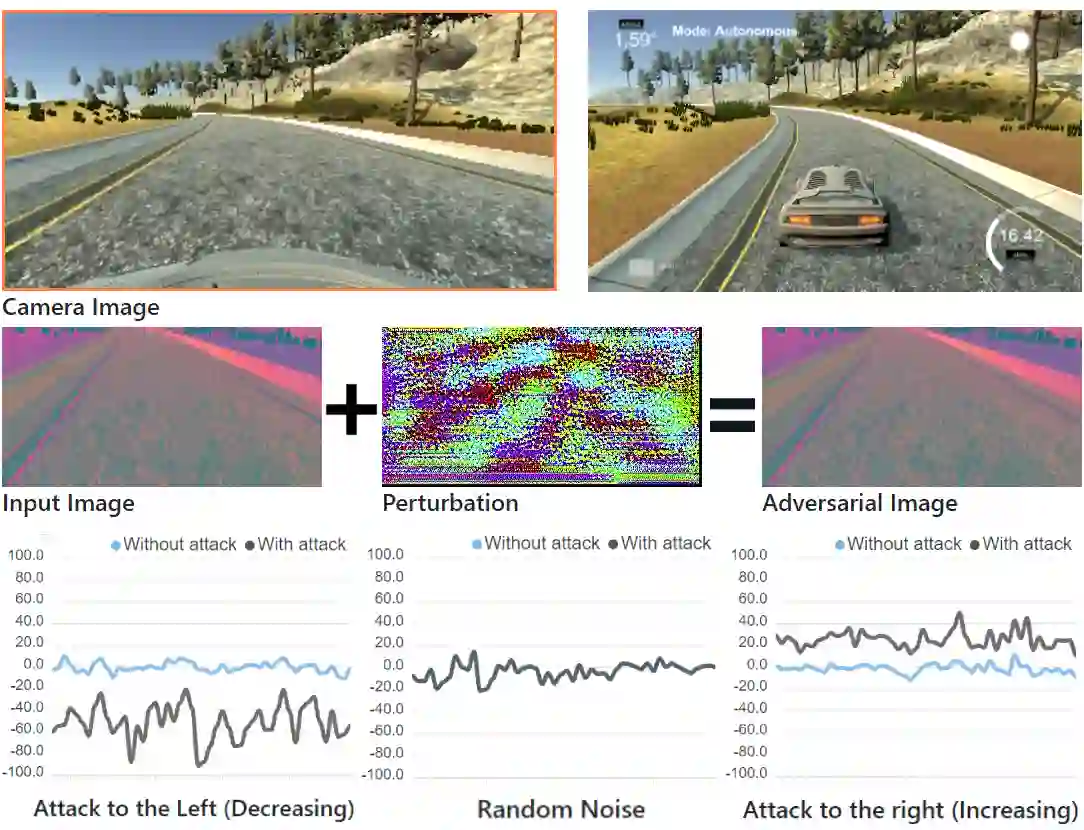
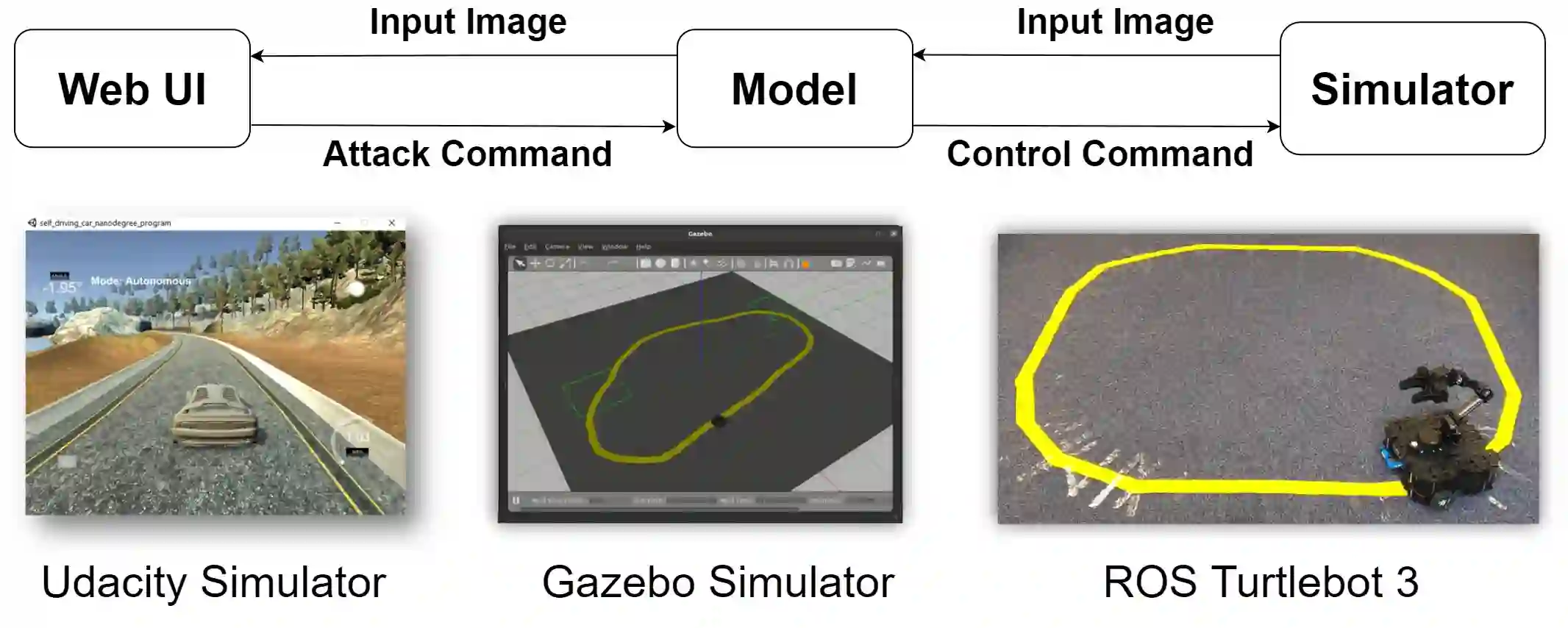
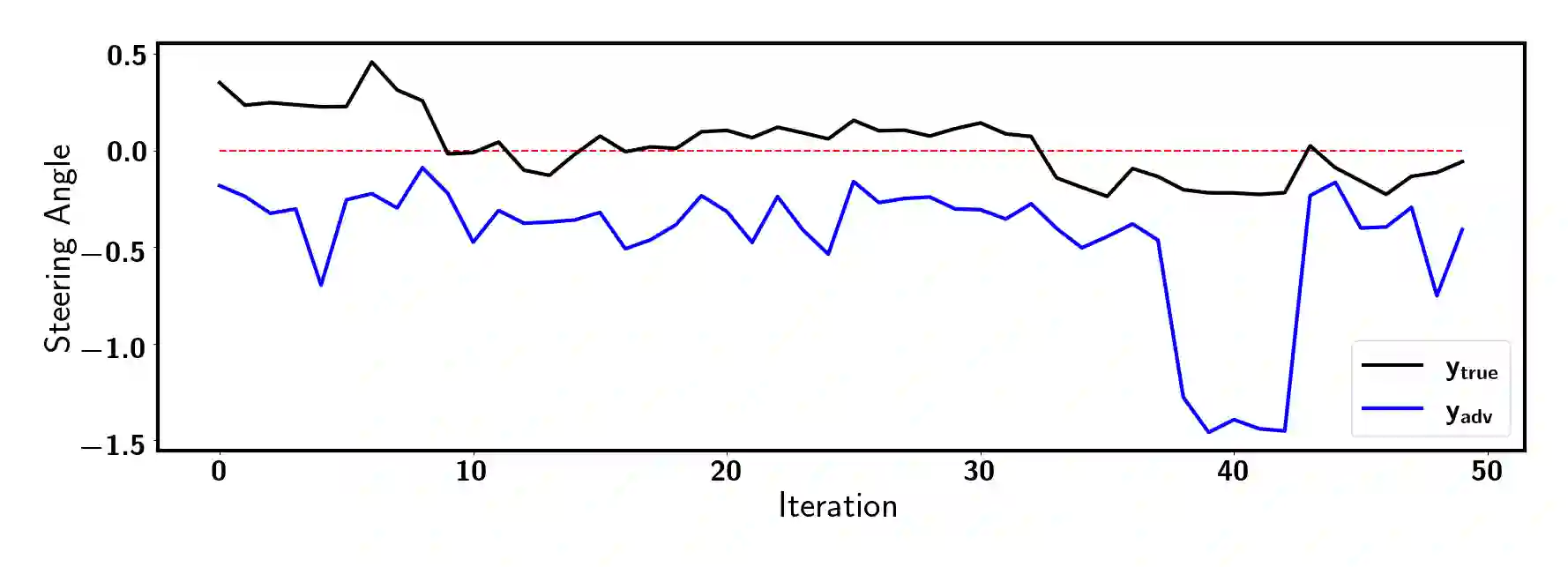
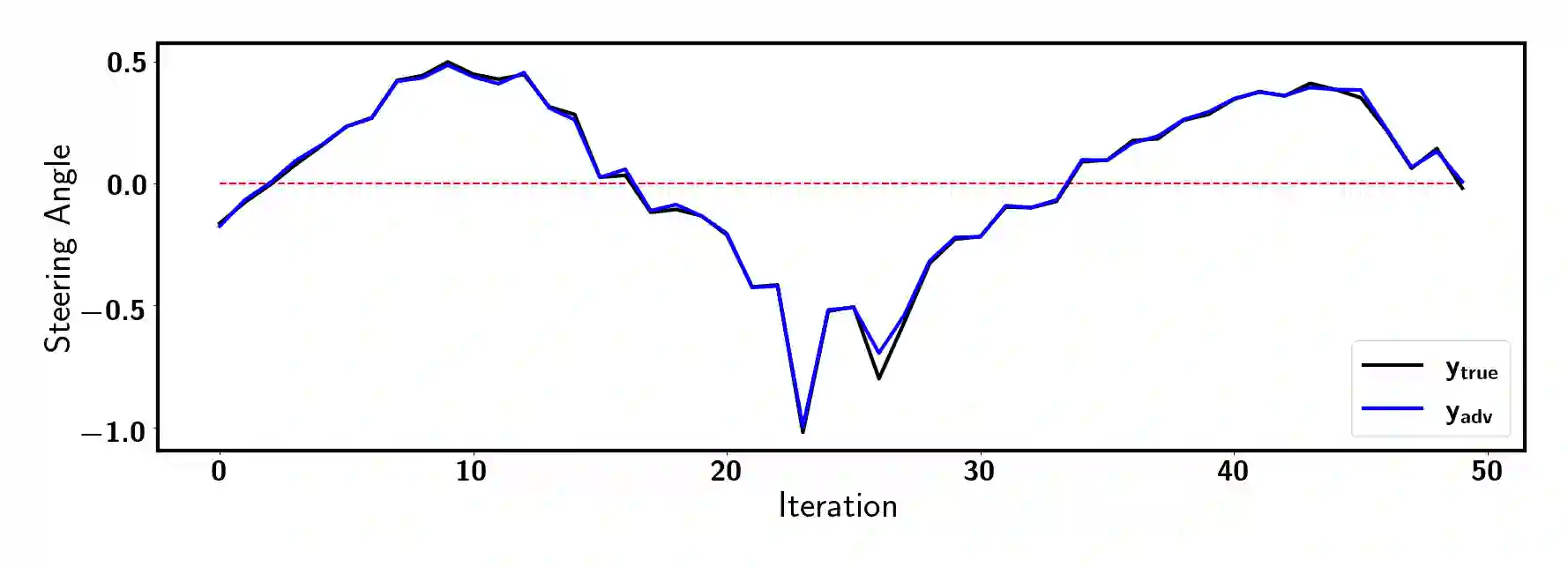
As research in deep neural networks has advanced, deep convolutional networks have become feasible for automated driving tasks. In particular, there is an emerging trend of employing end-to-end neural network models for the automation of driving tasks. However, previous research has shown that deep neural network classifiers are vulnerable to adversarial attacks. For regression tasks, however, the effect of adversarial attacks is not as well understood. In this paper, we devise two white-box targeted attacks against end-to-end autonomous driving systems. The driving systems use a regression model that takes an image as input and outputs a steering angle. Our attacks manipulate the behavior of the autonomous driving system by perturbing the input image. Both attacks can be initiated in real-time on CPUs without employing GPUs. The efficiency of the attacks is illustrated using experiments conducted in Udacity. Demo video: https://youtu.be/I0i8uN2oOP0.
翻译:随着对深层神经网络的研究的推进,深层连动网络已经为自动化驾驶任务变得可行,特别是出现了使用端到端神经网络模型实现驾驶任务自动化的新趋势,然而,以往的研究显示,深神经网络分类者很容易受到对抗性攻击。然而,对于回归任务,对对抗性攻击的影响了解不够。在本文中,我们设计了两种针对端到端自主驾驶系统的白箱定向攻击。驱动系统使用一个回归模型,将图像作为输入和输出方向。我们的攻击通过渗透输入图像来操纵自动驾驶系统的行为。两种攻击都可以在不使用 GPU 的情况下实时对CPUs发起。攻击的效率是通过在Udacity 进行的实验来说明的。Demo视频:https://youtu.be/I0i8uN2OP0。