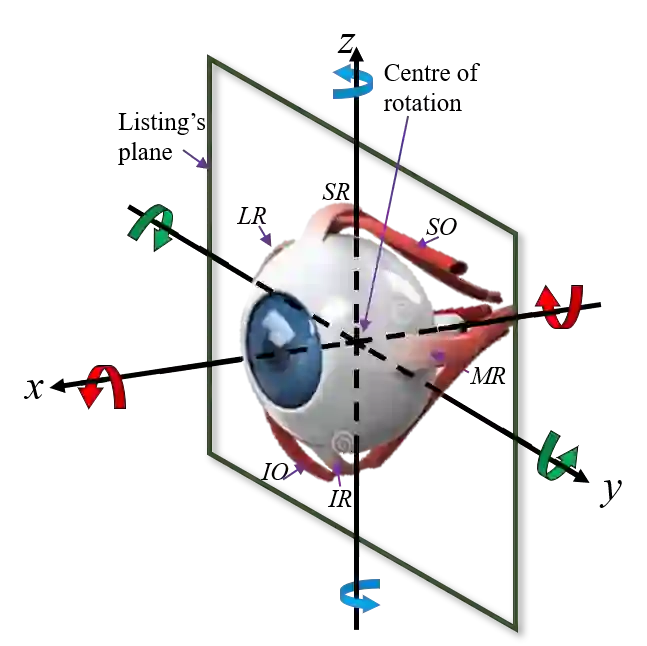
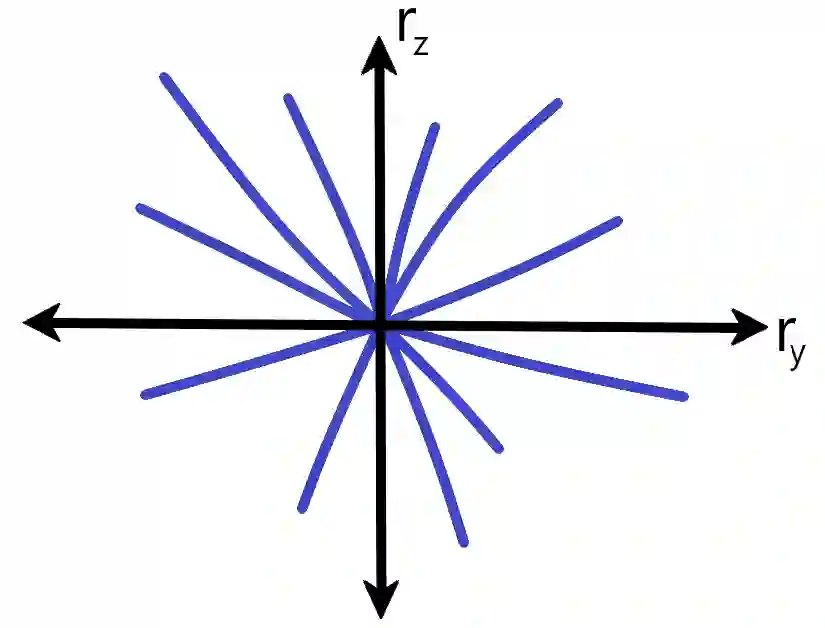
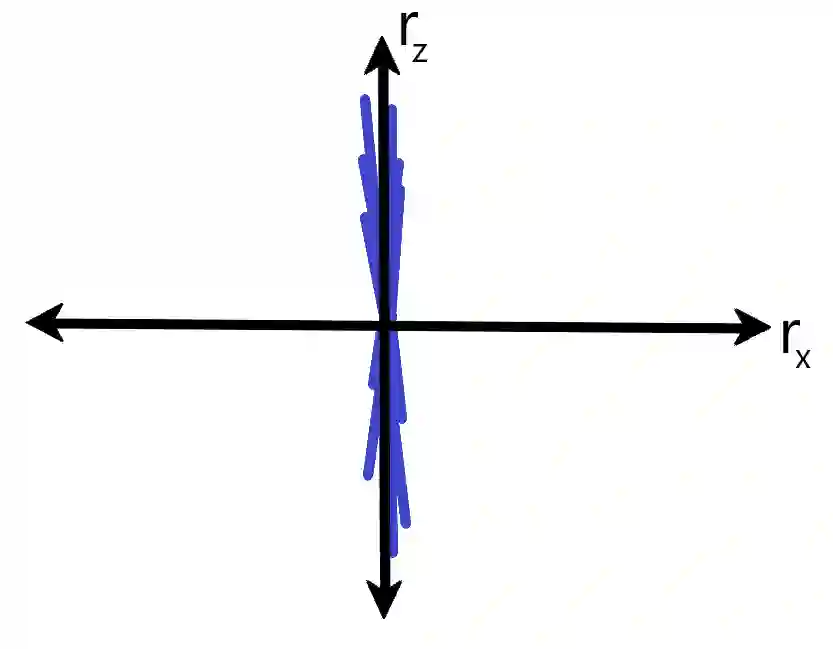
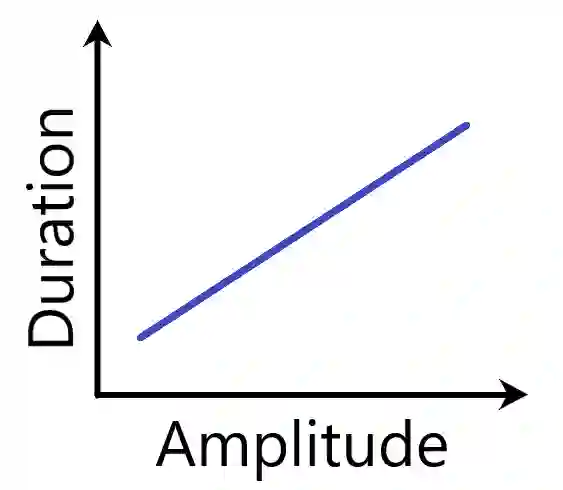
In human-robot interactions, eye movements play an important role in non-verbal communication. However, controlling the motions of a robotic eye that display similar performance as the human oculomotor system is still a major challenge. In this paper, we study how to control a realistic model of the human eye with a cable-driven actuation system that mimics the six degrees of freedom of the extra-ocular muscles. The biomimetic design introduces novel challenges to address, most notably the need to control the pretension on each individual muscle to prevent the loss of tension during motion, that would lead to cable slack and lack of control. We built a robotic prototype and developed a nonlinear simulator and two controllers. In the first approach, we linearized the nonlinear model, using a local derivative technique, and designed linear-quadratic optimal controllers to optimize a cost function that accounts for accuracy, energy expenditure, and movement duration. The second method uses a recurrent neural network that learns the nonlinear system dynamics from sample trajectories of the system, and a non-linear trajectory optimization solver that minimizes a similar cost function. We focused on the generation of rapid saccadic eye movements with fully unconstrained kinematics, and the generation of control signals for the six cables that simultaneously satisfied several dynamic optimization criteria. The model faithfully mimics the three-dimensional rotational kinematics and dynamics observed for human saccades. Our experimental results indicate that while both methods yielded similar results, the nonlinear method is more flexible for future improvements to the model, for which the calculations of the linearized model's position-dependent pretensions and local derivatives become particularly tedious.
翻译:在人类机器人互动中,眼部运动在非语言通信中起着重要作用。然而,控制机器人眼的运动,其性能与人类阴极运动系统相似,这仍然是一个重大挑战。在本文中,我们研究如何控制现实的人体眼模型,使用有线驱动的触动系统,模仿外科肌肉的六度自由度。生物模拟设计提出了应对的新挑战,最明显的是需要控制每个肌肉的先变,以防止在运动期间失去紧张状态,从而导致电缆松懈和缺乏控制。我们建立了一个机器人眼的运动模型,并开发了一个非线性模拟器和两个控制器。在第一个方法中,我们研究如何控制一个现实的人体眼模型模型,使用有线性振动系统六度自由度自由度的自由度。第二个方法使用一个经常性的神经系统网络,从系统的抽样轨迹中学习非线性系统改善,这将导致有线性松懈和缺乏控制。我们所观察到的非线性动态的机器人原型原型模型模型模型,用来显示,在快速的电流动运行中,我们最接近的机率的机能计算方法可以最大限度地降低成本。