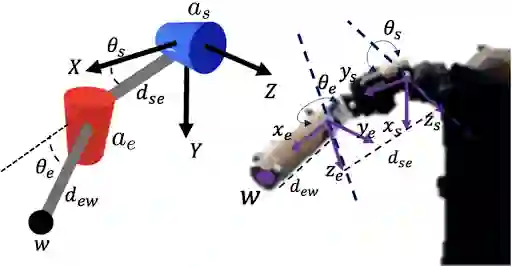
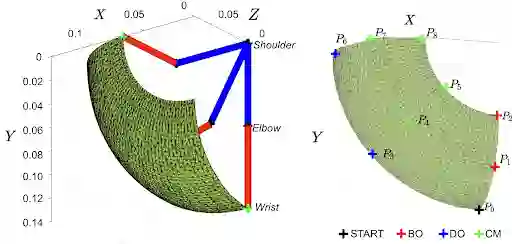
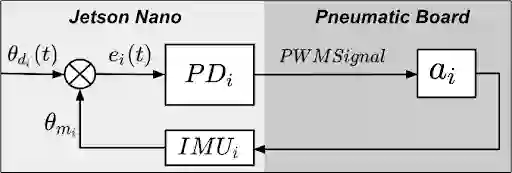
This work focuses on closed-loop control based on proprioceptive feedback for a pneumatically-actuated soft wearable device aimed at future support of infant reaching tasks. The device comprises two soft pneumatic actuators (one textile-based and one silicone-casted) actively controlling two degrees-of-freedom per arm (shoulder adduction/abduction and elbow flexion/extension, respectively). Inertial measurement units (IMUs) attached to the wearable device provide real-time joint angle feedback. Device kinematics analysis is informed by anthropometric data from infants (arm lengths) reported in the literature. Range of motion and muscle co-activation patterns in infant reaching are considered to derive desired trajectories for the device's end-effector. Then, a proportional-derivative controller is developed to regulate the pressure inside the actuators and in turn move the arm along desired setpoints within the reachable workspace. Experimental results on tracking desired arm trajectories using an engineered mannequin are presented, demonstrating that the proposed controller can help guide the mannequin's wrist to the desired setpoints.
翻译:这项工作侧重于基于对一种气动活性软磨损装置自行感知反馈的封闭环控制,该装置旨在支持婴儿未来到达任务。该装置包括两个软气动动器(一个以纺织品为基础,一个以硅酮为主),积极控制每臂两度自由度(分别是肩感应/感应和肘感应/伸缩);与磨损装置相连的惰性测量单位(IMUs)提供实时联合角度反馈。根据文献中报告的婴儿(手臂长度)的人体测量数据,对设备运动进行感动分析。婴儿到达时的动作和肌肉共活动模式的范围被认为是该装置终端效应的预期轨迹。随后,将开发一个成比例式受控控制器,以调控引爆器内的压力,然后将手臂移到可达的工作空间内理想的定点上。在利用工程人脉冲跟踪所需手臂轨迹的实验结果中,展示了所拟议的固定控制器能帮助人向目标方向。