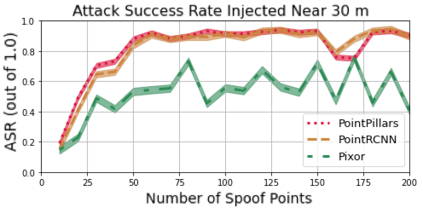
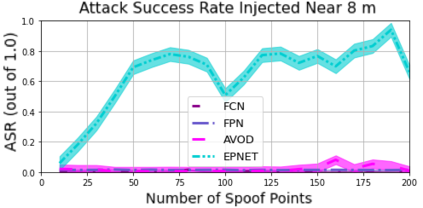
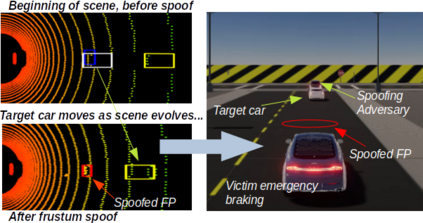
To enable safe and reliable decision-making, autonomous vehicles (AVs) feed sensor data to perception algorithms to understand the environment. Sensor fusion with multi-frame tracking is becoming increasingly popular for detecting 3D objects. Thus, in this work, we perform an analysis of camera-LiDAR fusion, in the AV context, under LiDAR spoofing attacks. Recently, LiDAR-only perception was shown vulnerable to LiDAR spoofing attacks; however, we demonstrate these attacks are not capable of disrupting camera-LiDAR fusion. We then define a novel, context-aware attack: frustum attack, and show that out of 8 widely used perception algorithms - across 3 architectures of LiDAR-only and 3 architectures of camera-LiDAR fusion - all are significantly vulnerable to the frustum attack. In addition, we demonstrate that the frustum attack is stealthy to existing defenses against LiDAR spoofing as it preserves consistencies between camera and LiDAR semantics. Finally, we show that the frustum attack can be exercised consistently over time to form stealthy longitudinal attack sequences, compromising the tracking module and creating adverse outcomes on end-to-end AV control.
翻译:为使安全可靠的决策,自主飞行器(AVs)向感知算法提供感官数据,以了解环境。感应器与多框架跟踪的结合在探测三维天体方面越来越受欢迎。因此,在这项工作中,我们在AV范围内,在LiDAR的潜伏攻击下,对AV范围内的相机-LiDAR聚变进行了分析。最近,LiDAR的唯一感知显示很容易受到LIDAR的潜伏攻击;然而,我们证明这些攻击无法破坏摄像机-LiDAR聚变的感知算法。然后,我们定义了一种新颖的背景觉攻击:暴动攻击,并显示在八种广泛使用的感知算法中,在LiDAR专用的3个建筑和3个照相机-LiDAR聚变结构中,我们分析一下,在Arustum-LiDAR的聚变形攻击中,所有这一切都极易受到暴动攻击的攻击。此外,我们证明,对Lidtumbertum攻击的现有防御手段是隐秘的。我们展示了摄像和静态攻击过程,可以持续进行长期的反向式攻击。