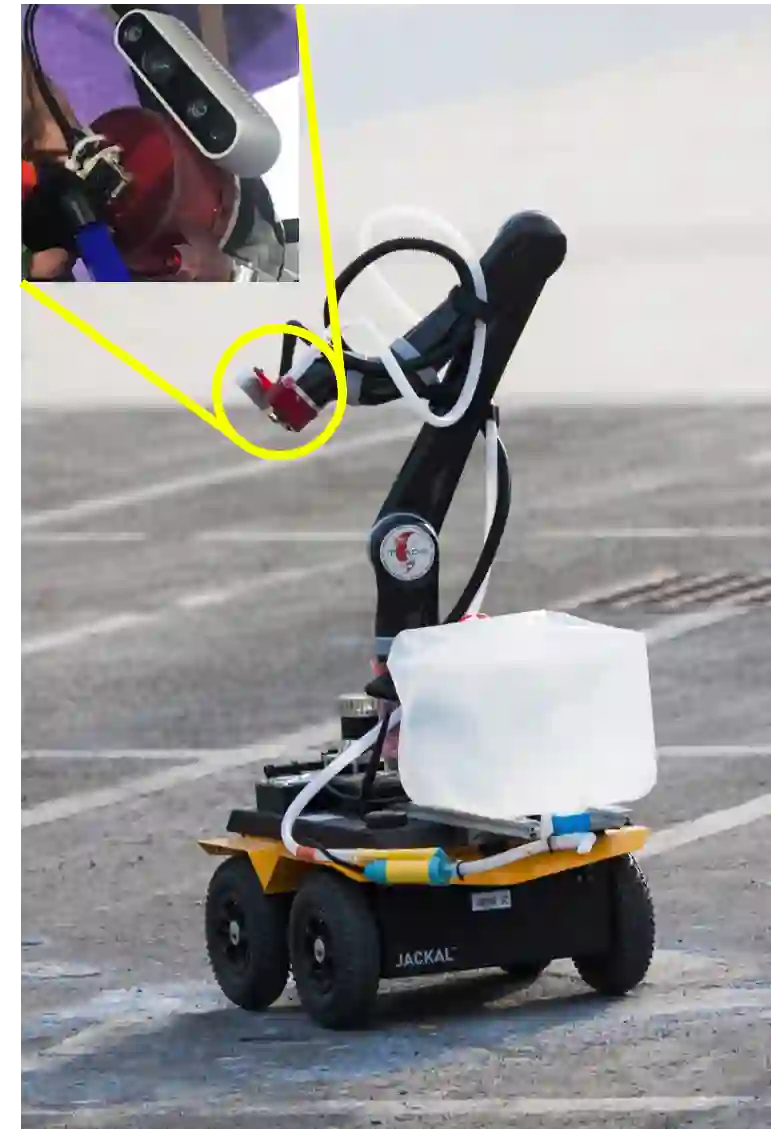
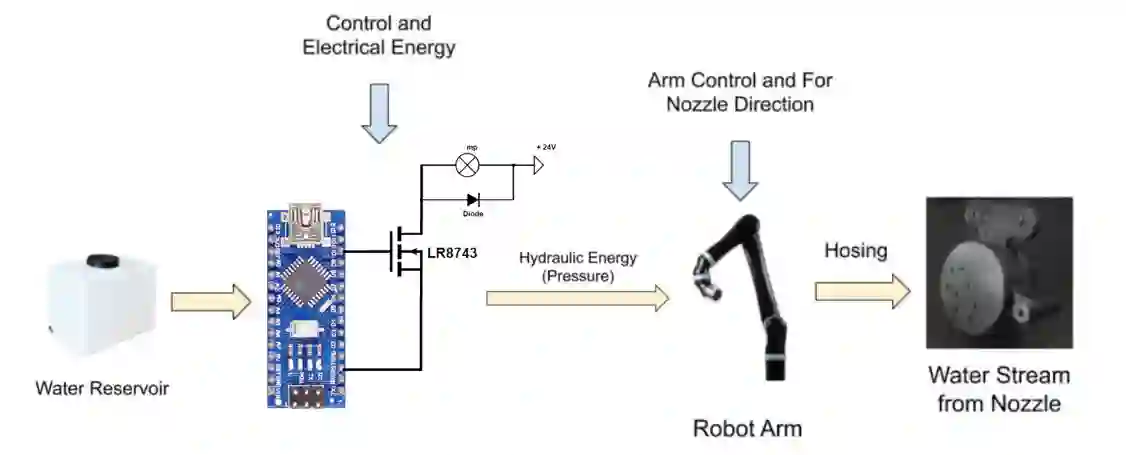
Autonomous mobile robots have the potential to solve missions that are either too complex or dangerous to be accomplished by humans. In this paper, we address the design and autonomous deployment of a ground vehicle equipped with a robotic arm for urban firefighting scenarios. We describe the hardware design and algorithm approaches for autonomous navigation, planning, fire source identification and abatement in unstructured urban scenarios. The approach employs on-board sensors for autonomous navigation and thermal camera information for source identification. A custom electro{mechanical pump is responsible to eject water for fire abatement. The proposed approach is validated through several experiments, where we show the ability to identify and abate a sample heat source in a building. The whole system was developed and deployed during the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020, for Challenge No. 3 Fire Fighting Inside a High-Rise Building and during the Grand Challenge where our approach scored the highest number of points among all UGV solutions and was instrumental to win the first place.
翻译:自主移动机器人有潜力解决过于复杂或危险、无法由人类完成的任务。在本文件中,我们讨论了为城市消防设想设计和自主部署配备机器人臂的地面车辆的问题。我们描述了在无结构的城市情景中自主导航、规划、消防源识别和减排的硬件设计和算法方法。该方法使用自动导航的机载传感器和热相机信息进行源识别。定制的电机泵负责为减少火灾而排放水。拟议方法通过若干实验得到验证,其中我们展示了在建筑物中识别和减少抽样热源的能力。整个系统是在穆罕默德·本·扎耶德国际机器人挑战(2020年)、挑战3号在高频大楼中抗火以及大挑战期间开发和部署的。我们的方法在高频大楼中赢得了所有紫外线解决方案中最高的点,并且有助于赢得第一位。