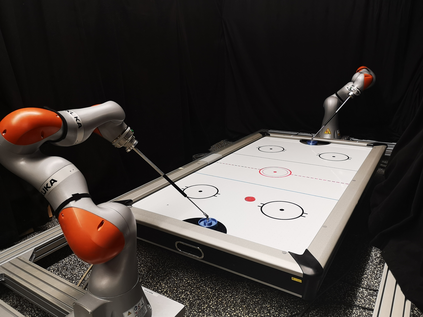
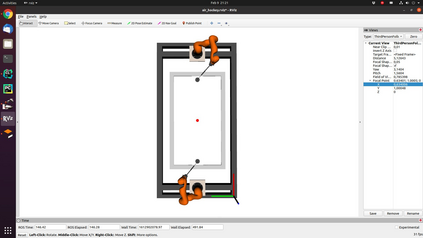
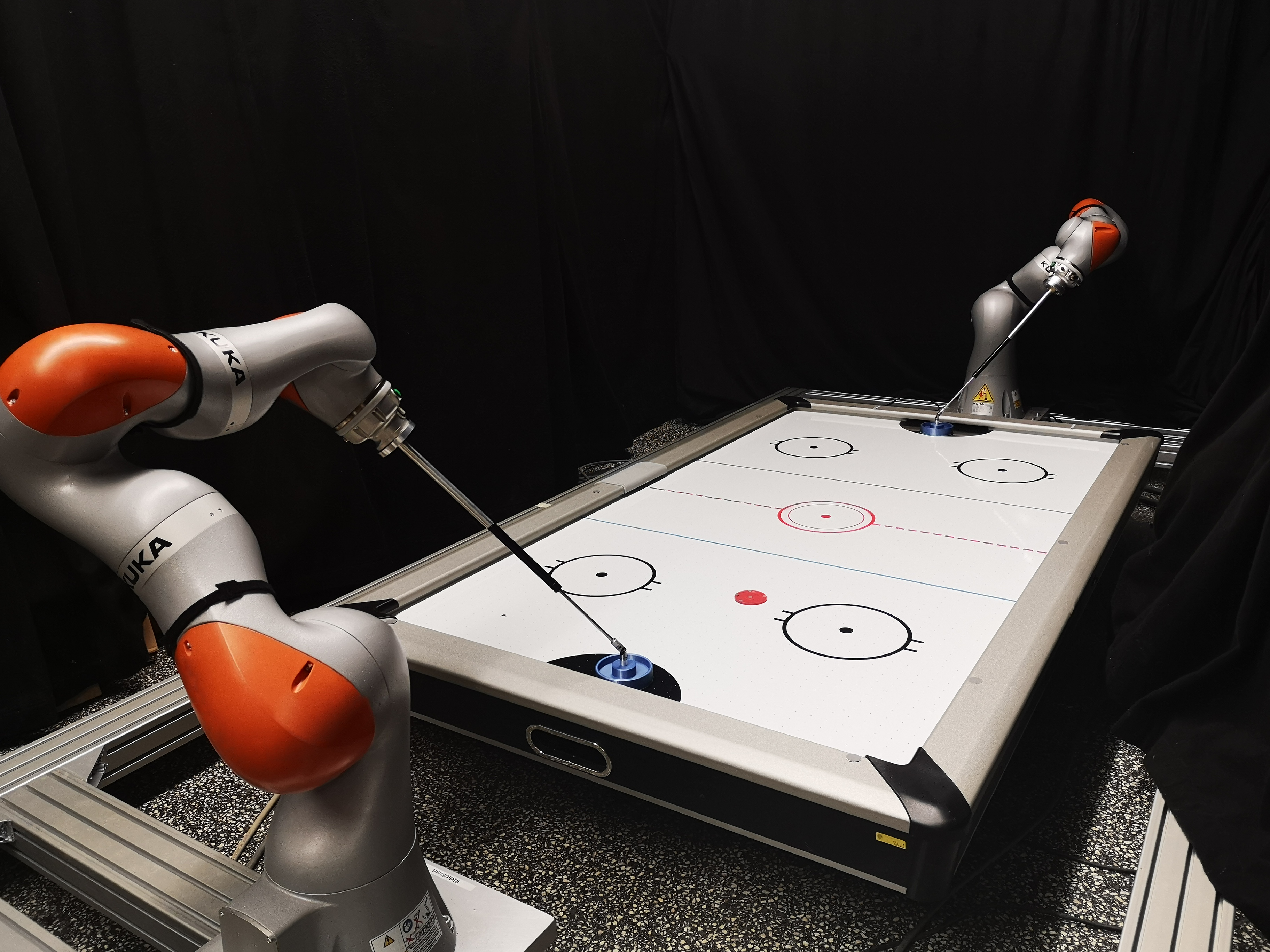
Highly dynamic robotic tasks require high-speed and reactive robots. These tasks are particularly challenging due to the physical constraints, hardware limitations, and the high uncertainty of dynamics and sensor measures. To face these issues, it's crucial to design robotics agents that generate precise and fast trajectories and react immediately to environmental changes. Air hockey is an example of this kind of task. Due to the environment's characteristics, it is possible to formalize the problem and derive clean mathematical solutions. For these reasons, this environment is perfect for pushing to the limit the performance of currently available general-purpose robotic manipulators. Using two Kuka Iiwa 14, we show how to design a policy for general-purpose robotic manipulators for the air hockey game. We demonstrate that a real robot arm can perform fast-hitting movements and that the two robots can play against each other on a medium-size air hockey table in simulation.
翻译:高度动态的机器人任务需要高速和被动的机器人。 由于物理限制、硬件限制以及动态和感官措施的高度不确定性,这些任务特别具有挑战性。 要面对这些问题,设计出能产生精确和快速轨迹并对环境变化立即作出反应的机器人剂至关重要。 空气曲棍球是这种任务的一个实例。 由于环境特性, 有可能将问题正规化并得出干净的数学解决方案。 基于这些原因, 这种环境对于推动限制现有通用机器人操纵器的性能是完美的。 我们用两个 Kuka Iiwa 14 来演示如何设计空曲棍球游戏通用机器人操纵器的政策。 我们证明真正的机器人臂可以进行快速打击运动, 两个机器人可以在模拟的中等空冰球桌上相互竞争。