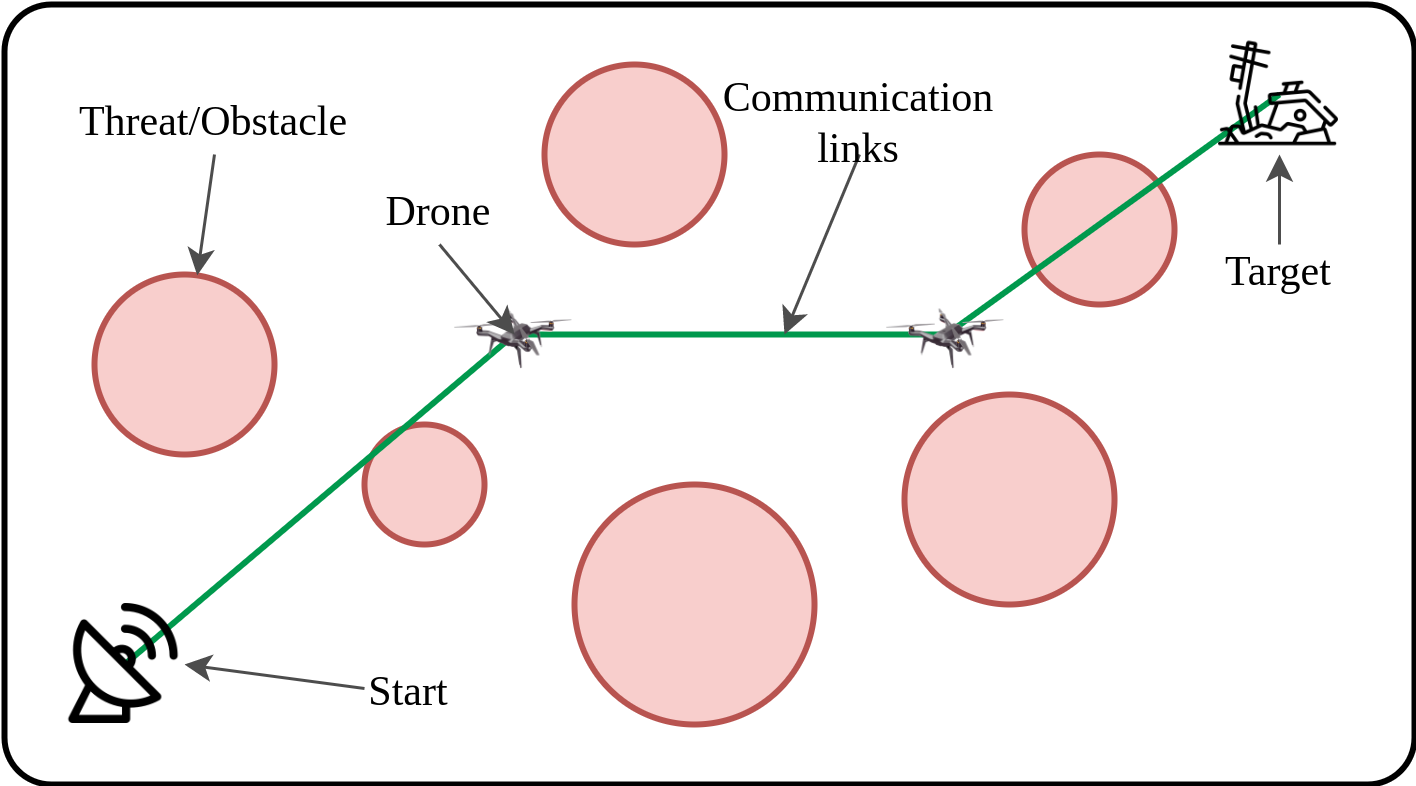
This study proposes an approach for establishing an optimal multihop ad-hoc network using multiple unmanned aerial vehicles (UAVs) to provide emergency communication in disaster areas. The approach includes two stages, one uses particle swarm optimization (PSO) to find optimal positions to deploy UAVs, and the other uses a behavior-based controller to navigate the UAVs to their assigned positions without colliding with obstacles in an unknown environment. Several constraints related to the UAVs' sensing and communication ranges have been imposed to ensure the applicability of the proposed approach in real-world scenarios. A number of simulation experiments with data loaded from real environments have been conducted. The results show that our proposed approach is not only successful in establishing multihop ad-hoc routes but also meets the requirements for real-time deployment of UAVs.
翻译:这项研究提出了一种办法,用以建立一个利用多无人驾驶飞行器提供灾害地区紧急通信的最佳多光伏特设网络,其中包括两个阶段,一个阶段是利用粒子群优化(PSO)找到部署无人驾驶飞行器的最佳位置,另一个阶段是使用基于行为的控制器将无人驾驶飞行器引导到其指定的位置,而不会与未知环境中的障碍相冲突。与无人驾驶飞行器的感应和通信范围有关的一些限制已经施加,以确保拟议办法在现实世界情景中的适用性。已经进行了若干模拟实验,从真实环境中输入数据。结果显示,我们拟议的办法不仅成功地建立了多光速临时航线,而且满足了实时部署无人驾驶飞行器的要求。