
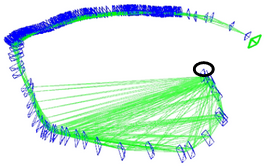
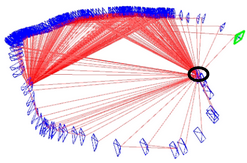
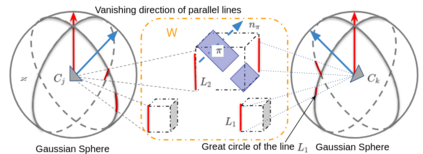
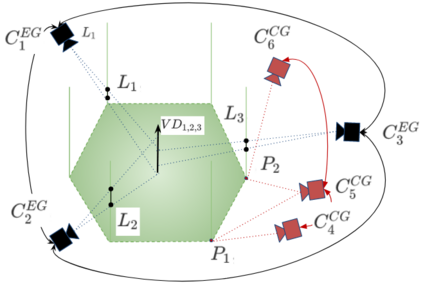
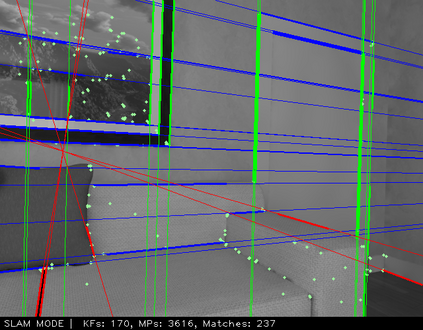
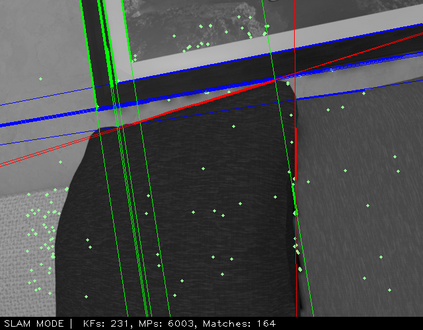
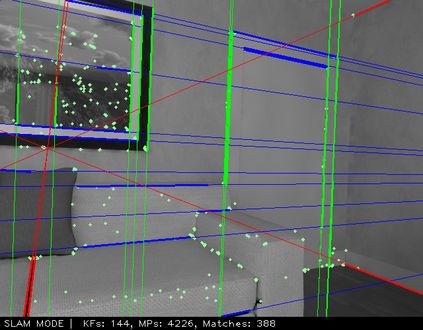
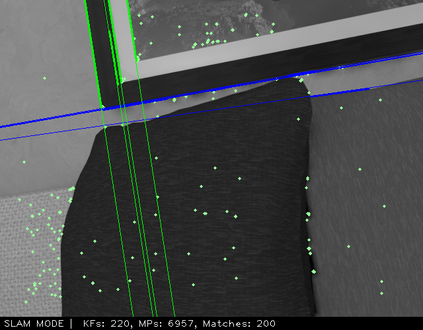
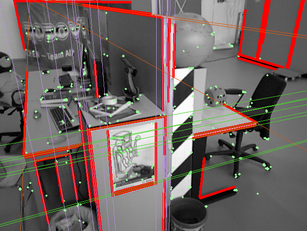
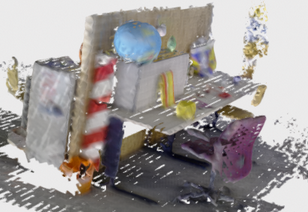
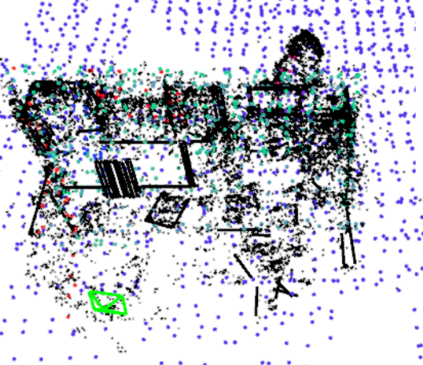
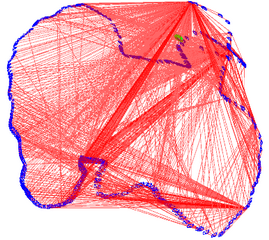
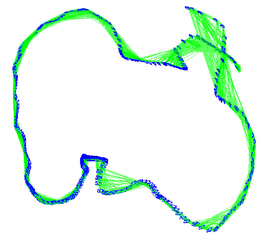
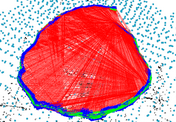
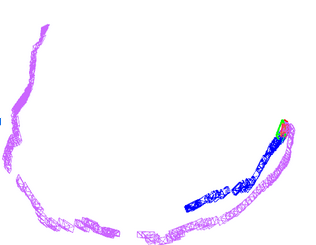
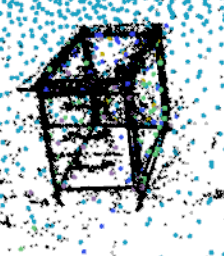
Minimal solutions for relative rotation and translation estimation tasks have been explored in different scenarios, typically relying on the so-called co-visibility graph. However, how to build direct rotation relationships between two frames without overlap is still an open topic, which, if solved, could greatly improve the accuracy of visual odometry. In this paper, a new minimal solution is proposed to solve relative rotation estimation between two images without overlapping areas by exploiting a new graph structure, which we call Extensibility Graph (E-Graph). Differently from a co-visibility graph, high-level landmarks, including vanishing directions and plane normals, are stored in our E-Graph, which are geometrically extensible. Based on E-Graph, the rotation estimation problem becomes simpler and more elegant, as it can deal with pure rotational motion and requires fewer assumptions, e.g. Manhattan/Atlanta World, planar/vertical motion. Finally, we embed our rotation estimation strategy into a complete camera tracking and mapping system which obtains 6-DoF camera poses and a dense 3D mesh model. Extensive experiments on public benchmarks demonstrate that the proposed method achieves state-of-the-art tracking performance.
翻译:相对轮换和翻译估计任务的最起码的解决方案在不同的情景中得到了探讨,通常依靠所谓的共同可见图。然而,如何在两个框架之间建立不重叠的直接轮换关系仍然是一个开放的话题,如果解决,可以大大提高视觉观察测量的准确性。在本文中,提出了一个新的最起码的解决方案,通过利用我们称为“扩展图”的新图形结构(E-Graph)解决两个图像之间没有重叠的相对轮换估计。不同于共同可见图,高层次的里程碑,包括消失方向和平面正常,都储存在我们的E-Graph中,这是几何分布式扩展式的。基于E-Graph,轮调估计问题变得更加简单和优雅,因为它可以处理纯粹的旋转运动,需要较少的假设,例如曼哈顿/亚特朗塔世界,平面/垂直运动。最后,我们把我们的轮换估计战略嵌入一个完整的照相机跟踪和绘图系统,获得6-DoF摄像头的配置和一个密度3D型模型。关于公共基准的大规模实验表明,拟议的方法能够实现状态的跟踪。




相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem
