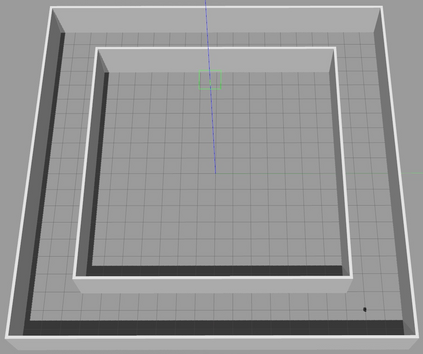
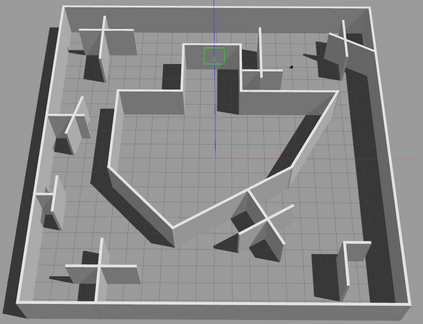
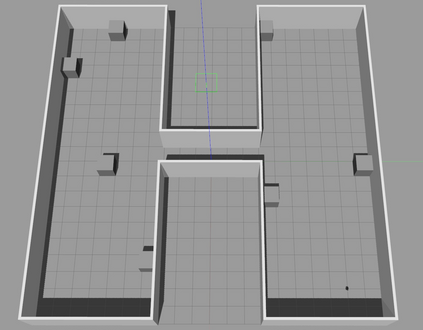
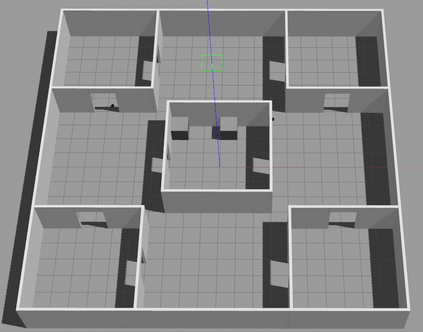
Autonomous exploration and mapping of unknown terrains employing single or multiple robots is an essential task in mobile robotics and has therefore been widely investigated. Nevertheless, given the lack of unified data sets, metrics, and platforms to evaluate the exploration approaches, we develop an autonomous robot exploration benchmark entitled Explore-Bench. The benchmark involves various exploration scenarios and presents two types of quantitative metrics to evaluate exploration efficiency and multi-robot cooperation. Explore-Bench is extremely useful as, recently, deep reinforcement learning (DRL) has been widely used for robot exploration tasks and achieved promising results. However, training DRL-based approaches requires large data sets, and additionally, current benchmarks rely on realistic simulators with a slow simulation speed, which is not appropriate for training exploration strategies. Hence, to support efficient DRL training and comprehensive evaluation, the suggested Explore-Bench designs a 3-level platform with a unified data flow and $12 \times$ speed-up that includes a grid-based simulator for fast evaluation and efficient training, a realistic Gazebo simulator, and a remotely accessible robot testbed for high-accuracy tests in physical environments. The practicality of the proposed benchmark is highlighted with the application of one DRL-based and three frontier-based exploration approaches. Furthermore, we analyze the performance differences and provide some insights about the selection and design of exploration methods. Our benchmark is available at https://github.com/efc-robot/Explore-Bench.
翻译:利用单一或多机器人自主勘探和测绘未知地形是移动机器人的一项基本任务,因此已经进行了广泛调查,然而,鉴于缺乏统一的数据集、指标和平台来评价勘探方法,我们制定了一个自主的机器人勘探基准,题为 " 探空-邦奇 " ;该基准涉及各种勘探设想,并提出了两种定量指标来评价勘探效率和多机器人合作。探索-邦奇极为有用,因为最近,在机器人勘探任务中广泛使用了深强化学习(DRL),并取得了有希望的成果。然而,培训基于DRL的方法需要大型数据集,此外,目前的基准依赖现实的模拟模拟器,而模拟速度较慢,不适合培训勘探战略。因此,为支持DRL培训和全面评估,拟议中的3级平台设计了一个统一的数据流和12美元速度提升平台,其中包括基于网络的快速评估和高效培训模拟器,一个现实的Gazebo模拟器,以及一个可远程访问的机器人测试室,用于高实用/底基勘探方法。在高实用/底基的物理环境中,我们提出的一些基于实地评估/直观评估方法的可获取性测试。