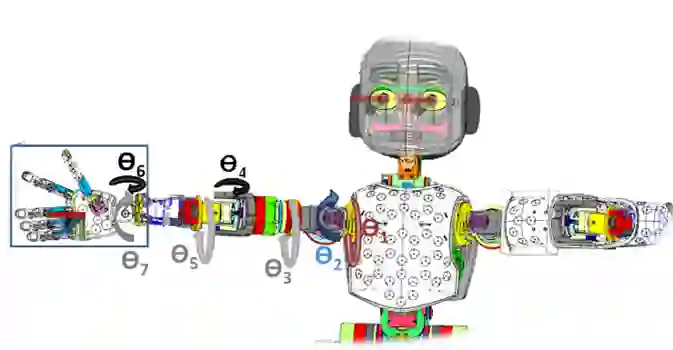
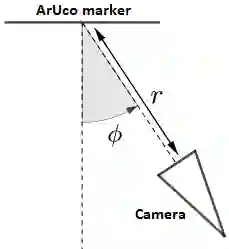
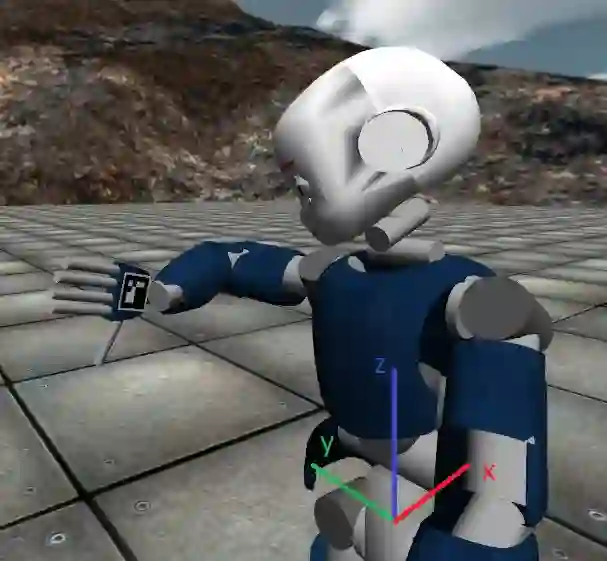
Humanoid robots have complex bodies and kinematic chains with several Degrees-of-Freedom (DoF) which are difficult to model. Learning the parameters of a kinematic model can be achieved by observing the position of the robot links during prospective motions and minimising the prediction errors. This work proposes a movement efficient approach for estimating online the body-schema of a humanoid robot arm in the form of Denavit-Hartenberg (DH) parameters. A cost-sensitive active learning approach based on the A-Optimality criterion is used to select optimal joint configurations. The chosen joint configurations simultaneously minimise the error in the estimation of the body schema and minimise the movement between samples. This reduces energy consumption, along with mechanical fatigue and wear, while not compromising the learning accuracy. The work was implemented in a simulation environment, using the 7DoF arm of the iCub robot simulator. The hand pose is measured with a single camera via markers placed in the palm and back of the robot's hand. A non-parametric occlusion model is proposed to avoid choosing joint configurations where the markers are not visible, thus preventing worthless attempts. The results show cost-sensitive active learning has similar accuracy to the standard active learning approach, while reducing in about half the executed movement.
翻译:人类机器人有复杂的身体和运动链条,具有若干难以建模的自由度标准(DoF) 。 学习运动模型的参数可以通过在可能的动作中观察机器人链接的位置和尽量减少预测误差来实现。 这项工作提出一种运动高效的方法, 以Denavit- Hartenberg(DH) 参数的形式, 在线估计人体机器人臂的体- 气管。 使用基于 A- 最佳度标准的成本敏感的积极学习方法, 选择最佳的联合配置。 选择的组合同时将身体机型估计的错误最小化, 并尽可能减少样品之间的移动。 这样可以减少能源消耗, 加上机械疲劳和磨损, 同时又不降低学习准确性。 这项工作是在模拟环境中实施的, 使用iCub 机器人模拟器的7DoF 气管进行。 手表通过放在手掌和后部的标记来测量。 一种非参数隔离模型建议避免选择联合配置, 在那里选择的标志具有相似的精确性, 从而避免进行不显见效性的标准学习结果。