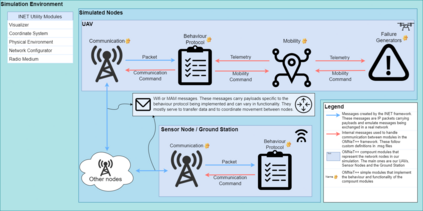
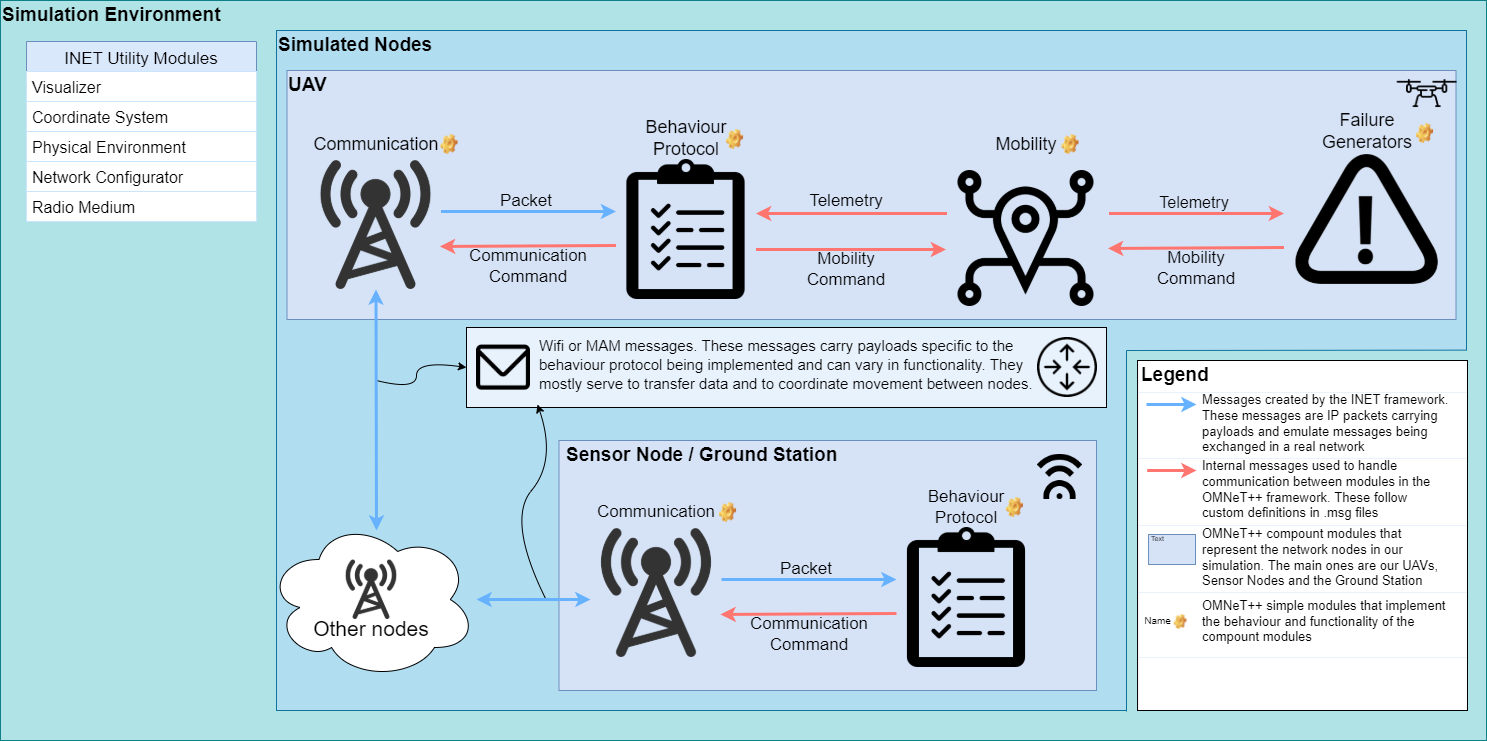
This technical report describes GrADyS-SIM, a framework for simulating cooperating swarms of UAVs in joint mission in hypothetical landscape and communicating through RF radios. The framework was created to aid and verify the communication, coordination and context-awareness protocols being developed in the GrADyS project. GrADyS-SIM uses the OMNeT++ simulation library and its INET model suite and and allows for addition of modified or customized versions of some simulated components, network configurations and vehicle coordination, so that new coordination protocols can be developed and tested through the framework. The framework simulates UAV movement dictated by file containing some MAVLink instructions and affected on the fly by different network situations. The UAV swarm coordination protocol emerges from individual interactions between UAVs and has the objective of optimizing the collection of sensor data over an area. It also allows for the simulation of some types of failures to test the protocol adaptability. Every node in the simulation is highly configurable making testing different network opographies, coordination protocols, node hardware configurations and more a quick task.
翻译:本技术报告描述了GRADYS-SIM,这是一个在假设的地貌和通过RF无线电进行通信的联合飞行任务中模拟无人驾驶航空器合作成群的框架,建立这个框架是为了协助和核查在GRADYS项目中正在开发的通信、协调和背景意识协议。GRADYS-SIM使用OMNET++模拟图书馆及其INET模型套件,并允许添加一些经修改或定制的模拟组件、网络配置和车辆协调版本,以便通过框架制定和测试新的协调协议。框架模拟载有一些MAVLink指令的文件所要求的无人驾驶航空器移动,并受到不同网络情况的影响。UAVSwarm协调协议产生于UAV的个体互动,目的是优化在某一区域收集传感器数据的工作。它还允许模拟某些类型的故障,以测试协议的适应性。模拟中的每个节点都是高度可调和的,以测试不同的网络透析、协调协议、节点硬件配置和更快速的任务。