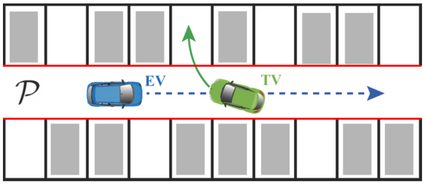
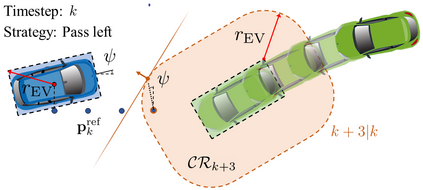
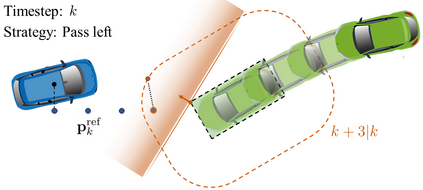
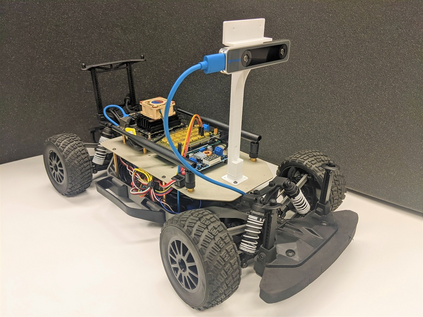
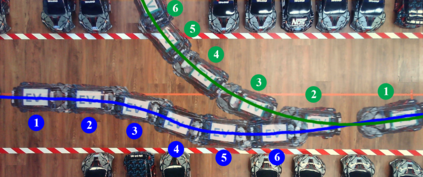
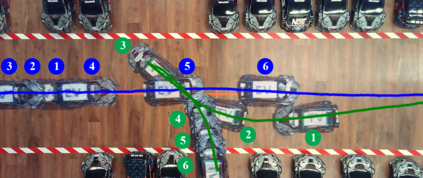
We present a hierarchical control approach for maneuvering an autonomous vehicle (AV) in tightly-constrained environments where other moving AVs and/or human driven vehicles are present. A two-level hierarchy is proposed: a high-level data-driven strategy predictor and a lower-level model-based feedback controller. The strategy predictor maps an encoding of a dynamic environment to a set of high-level strategies via a neural network. Depending on the selected strategy, a set of time-varying hyperplanes in the AV's position space is generated online and the corresponding halfspace constraints are included in a lower-level model-based receding horizon controller. These strategy-dependent constraints drive the vehicle towards areas where it is likely to remain feasible. Moreover, the predicted strategy also informs switching between a discrete set of policies, which allows for more conservative behavior when prediction confidence is low. We demonstrate the effectiveness of the proposed data-driven hierarchical control framework in a two-car collision avoidance scenario through simulations and experiments on a 1/10 scale autonomous car platform where the strategy-guided approach outperforms a model predictive control baseline in both cases.
翻译:在有其他移动的AV和(或)人驾驶车辆存在的其他移动型AV和(或)载人驾驶车辆的严格受限制的环境中,我们提出了一个等级控制办法,用于在有其他移动型AV和(或)载人驾驶车辆存在的情况下驾驶自主车辆。建议分两级:一个高层次的数据驱动战略预测器和一个低层次的模型反馈控制器。战略预测器通过神经网络将动态环境编码为一套高层次战略。根据选定的战略,在AV位置空间中产生一套有时间变化的超高机,并将相应的半空限制纳入一个低层次的基于模型的后退地平线控制器中。这些战略依赖的制约因素将车辆推向可能仍然可行的领域。此外,预测战略还显示一套独立的政策之间的转换,在预测信心低时可以采取更加保守的行为。我们通过模拟和实验,在1/10规模的自动汽车平台上,以战略指导的定位方法比模型的预测控制基线在两种情况下,在避免碰撞的双轨假设情景中显示拟议的数据驱动级控制框架的有效性。