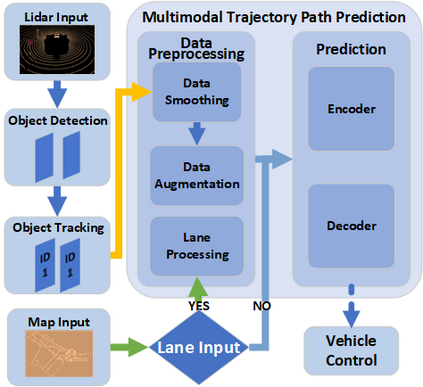
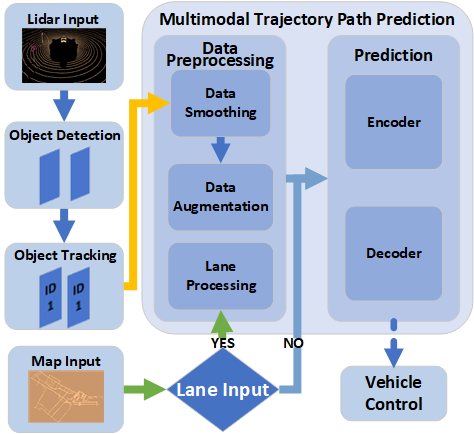
Reasoning about vehicle path prediction is an essential and challenging problem for the safe operation of autonomous driving systems. There exist many research works for path prediction. However, most of them do not use lane information and are not based on the Transformer architecture. By utilizing different types of data collected from sensors equipped on the self-driving vehicles, we propose a path prediction system named Multi-modal Transformer Path Prediction (MTPP) that aims to predict long-term future trajectory of target agents. To achieve more accurate path prediction, the Transformer architecture is adopted in our model. To better utilize the lane information, the lanes which are in opposite direction to target agent are not likely to be taken by the target agent and are consequently filtered out. In addition, consecutive lane chunks are combined to ensure the lane input to be long enough for path prediction. An extensive evaluation is conducted to show the efficacy of the proposed system using nuScene, a real-world trajectory forecasting dataset.
翻译:车辆路径预测是自动驾驶系统安全运行的一个至关重要和具有挑战性的问题。存在许多用于路径预测的研究工作。但是,大多数不使用车道信息,也不以变压器结构为基础。我们利用从自驾驶车辆上配备的传感器收集的不同类型数据,提议了一个名为多式变压器路径预测(MTPP)的路径预测系统,其目的是预测目标物剂的长期未来轨迹。为了实现更准确的路径预测,我们模型采用了变压器结构。为了更好地利用车道信息,目标物剂不太可能取向与目标物剂相反的车道,因此被过滤出去。此外,将连续车道块组合在一起,确保车道输入的时间足够长,以便进行路径预测。我们进行了广泛的评估,以展示使用nuscene(真实世界轨迹预测数据集)的拟议系统的效率。