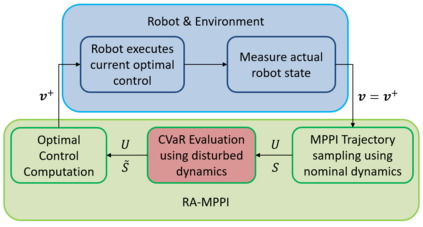
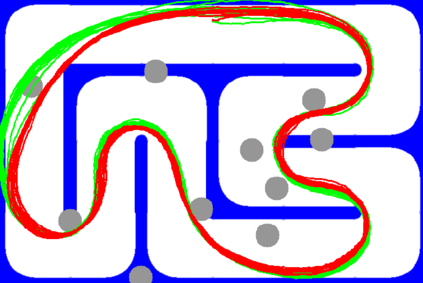
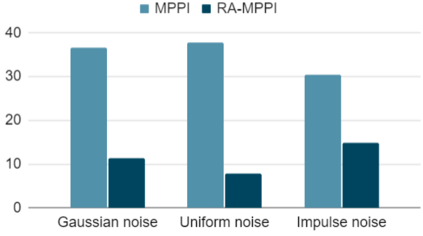
In this paper, we present a novel Model Predictive Control method for autonomous robots subject to arbitrary forms of uncertainty. The proposed Risk-Aware Model Predictive Path Integral (RA-MPPI) control utilizes the Conditional Value-at-Risk (CVaR) measure to generate optimal control actions for safety-critical robotic applications. Different from most existing Stochastic MPCs and CVaR optimization methods that linearize the original dynamics and formulate control tasks as convex programs, the proposed method directly uses the original dynamics without restricting the form of the cost functions or the noise. We apply the novel RA-MPPI controller to an autonomous vehicle to perform aggressive driving maneuvers in cluttered environments. Our simulations and experiments show that the proposed RA-MPPI controller can achieve about the same lap time with significantly fewer collisions compared to the baseline MPPI controller. The proposed controller performs on-line computation at an update frequency of up to 80Hz, utilizing modern Graphics Processing Units (GPUs) to multi-thread the generation of trajectories as well as the CVaR values.
翻译:在本文中,我们为受任意形式不确定性影响的自主机器人展示了一种新型模型预测控制方法。 拟议的风险- 软件模型预测路径综合控制( RA- MPPI) 使用条件值在危险环境中生成最佳控制动作的措施, 以产生对安全至关重要的机器人应用程序的最佳控制行动。 不同于大多数现有的Stochastic MPC 和 CVaR优化方法, 后者将原始动态线性线性化, 并将控制任务编成锥形程序, 拟议的方法直接使用原始动态, 而不限制成本函数或噪音的形式。 我们将新型的RA- MPPI 控制器应用到一个自主的飞行器, 在布满的环境中执行积极的驾驶动作。 我们的模拟和实验显示, 拟议的RA- MPPI 控制器可以在与基线 MPPI 控制器相较相较相近的相近的相同时间内完成相同的时间。 提议的控制器在80Hz 的更新频率上进行在线计算, 使用现代图形处理器( GPUPUs) 来多读轨迹谱和 CVR 值。