
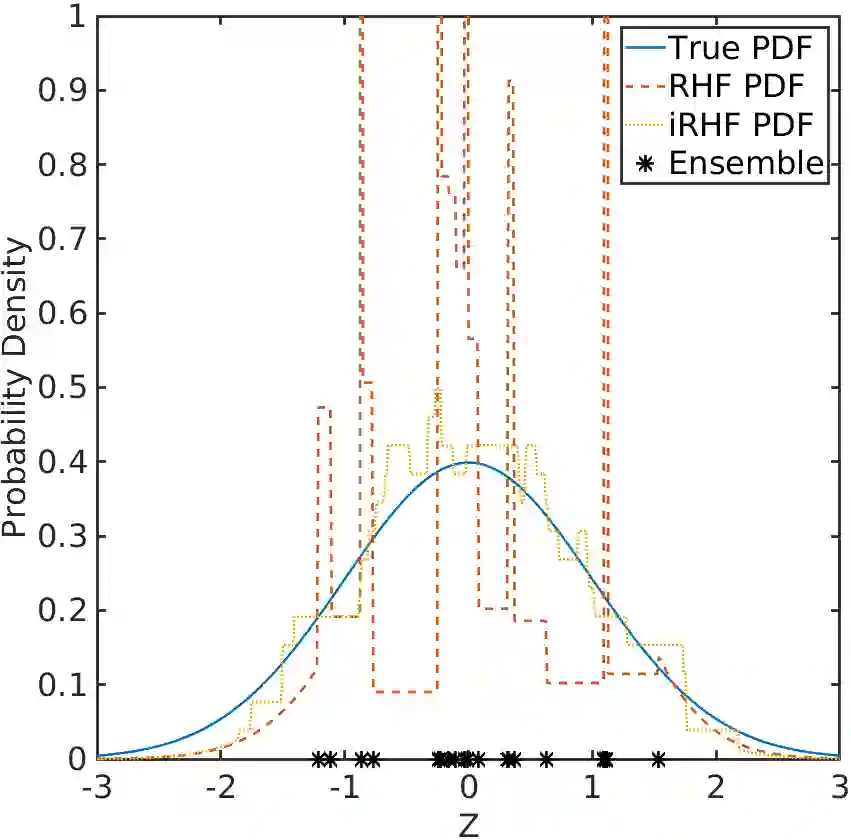
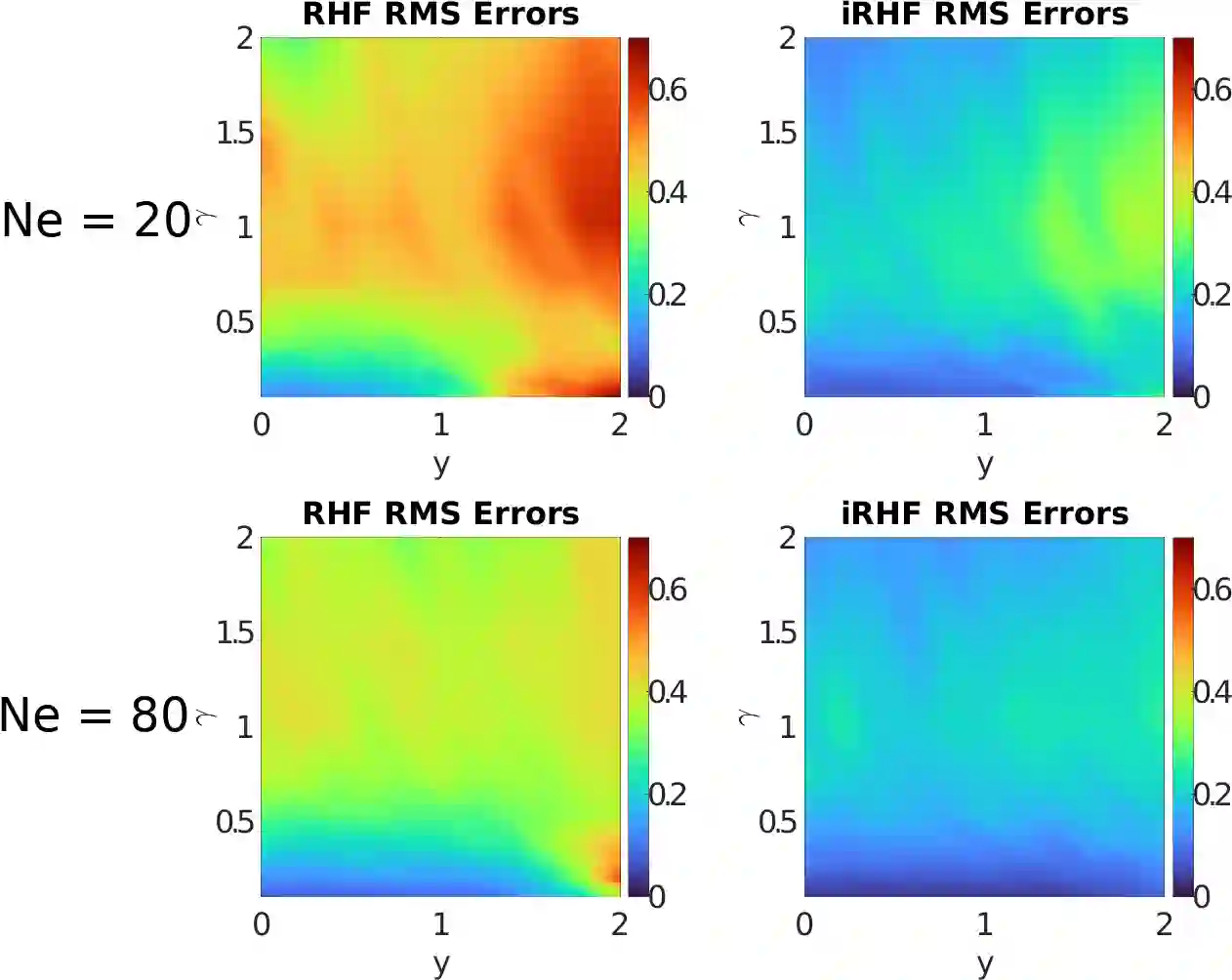
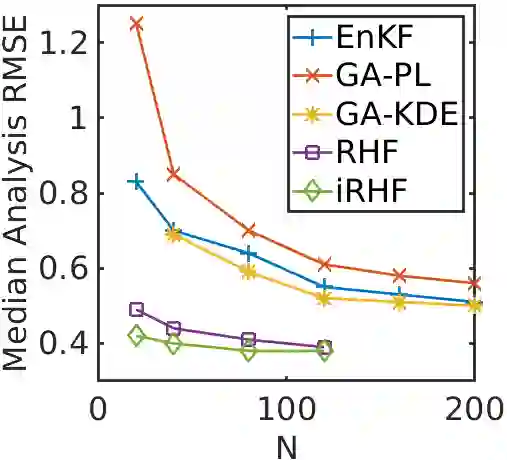
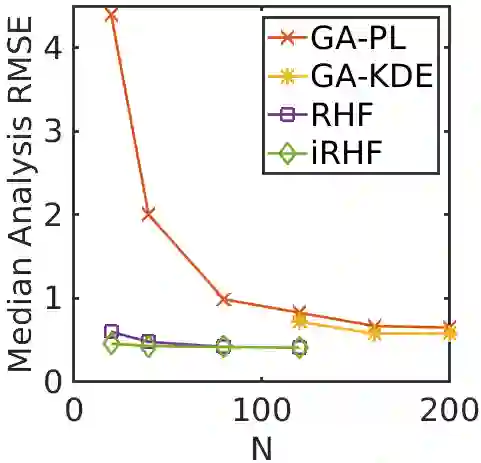
This paper reviews two nonlinear, non-Gaussian extensions of the Ensemble Kalman Filter: Gaussian anamorphosis (GA) methods and two-step updates, of which the rank histogram filter (RHF) is a prototypical example. GA-EnKF methods apply univariate transforms to the state and observation variables to make their distribution more Gaussian before applying an EnKF. The two-step methods use a scalar Bayesian update for the first step, followed by linear regression for the second step. The connection of the two-step framework to the full Bayesian problem is made, which opens the door to more advanced two-step methods in the full Bayesian setting. A new method for the first part of the two-step framework is proposed, with a similar form to the RHF but a different motivation, called the `improved RHF' (iRHF). A suite of experiments with the Lorenz-`96 model demonstrate situations where the GA-EnKF methods are similar to EnKF, and where they outperform EnKF. The experiments also strongly support the accuracy of the RHF and iRHF filters for nonlinear and non-Gaussian observations; these methods uniformly beat the EnKF and GA-EnKF methods in the experiments reported here. The new iRHF method is only more accurate than RHF at small ensemble sizes in the experiments reported here.
翻译:本文审视了Ensemble Kalman过滤器的两个非线性、非Gausian的扩展部分:Gaussian 畸形症(GA) 方法和两步更新,其中一级直方图过滤器(RHF)是一个原型例子。 GA-EnKF 方法将单象变换到州和观察变量,使其在应用 EnKF 之前的分布更加高标。两步方法首先使用Scalar Bayesian更新,然后为第二步进行线性回归。GA-EKF方法与整个Bayesian问题连接了两步框架(GA)和整个Bayesian问题,打开了更先进的两步方法的大门。提出了两步框架第一部分的新方法,其形式与RHF相似,但动机不同。 与Lorenz-96 模型的一组实验表明GA-EKF方法与ENKF相似, 并且它们在这里报告不甚甚精确的 RFSE-CF 精确度方法。
相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem


